 Laila F. Seddek1
Laila F. Seddek1 Abdelhalim Ebaid
Abdelhalim Ebaid- 1Department of Mathematics, College of Science and Humanities in Al-Kharj, Prince Sattam bin Abdulaziz University, Al-Kharj, Saudi Arabia
- 2Department of Mathematics, Faculty of Science, University of Tabuk, Tabuk, Saudi Arabia
- 3Department of Mathematics, College of Science, University of Bisha, Bisha, Saudi Arabia
Obtaining a solution of a given SDE is essential in neuroscience, especially, in modeling transmission of nerve impulses between neurons through myelin substance. This paper analyzes a particular scalar differential equation (SDE). The current scalar model involves two categories of differential equations–advanced and delayed–based on the domain of the independent variable. The results are consistent with existing literature as the advance/delay parameter approaches unity. Theoretical and graphical analyses of the solution’s properties are presented. To the best of our knowledge, this is the first study to analyze this form of SDE.
1 Introduction
In ordinary differential equations (ODEs), the equation
A question arises here: what is the type of the second ODE if
In this paper, we consider the following general form of the SDE:
where
To address this, a direct series approach is developed to solve the advanced equation. A closed-form expression of the series is obtained, and its convergence is established theoretically. These results are then used to construct the solution for the delayed equation. Several existing results in the literature can be recovered as special cases of the present findings. In addition, the properties of the obtained solutions are analyzed both theoretically and graphically. Finding a solution for a SDE is helpful for understanding the transmission of nerve impulses between neurons through myelin substance which covers all the nerves in the brain and nervous system in humans [27]. Other areas of applications can be further extended to involve some recent dynamical systems [28–30] and relatively new physical phenomena [31, 32].
2 Advanced equation
In the domain
Before discussing the main objective of this section, it is important to note that the condition:
must be satisfied by any solution to Equation 2 in addition to the initial condition (IC)
2.1 Closed-form series solution
An effective solution for a given model can be derived as a closed-form series solution. The solution in such a form facilitates numerical calculations and also leads to easier analysis to study the properties/behavior of the physical system. Let us attempt a series of solutions in the form of:
This assumption yields:
and
Substituting Equations 4–6 into Equation 2 leads to:
Hence,
From (4), we can write:
Employing (8), we obtain:
or
where
By applying IC
Substituting (13) into (11) yields:
and
where Equation 12 is implemented to calculate
2.2 Convergence analysis
To provide a theoretical proof of the convergence of the series solution (14), it is sufficient to prove the convergence of the series
Theorem 1. For
converge in the domain
Proof.Let us define,
Applying the ratio test:
Hence,
The limit on the right-hand side of the last equation tends toward zero as
which also tends toward zero, thereby completing the proof.
Remark 1. Through a similar analysis, we can easily prove that the series
2.3 Special case and exact solution
In this section, we show that the obtained series solution in Section 2.1 converges to the exact hyperbolic and trigonometric forms when
In this case, the solution given by Equation 14 reads:
where
This equation can be used to generate the following equations for the even-order coefficients
The numerator of solution (23) can be written as follows:
Similarly, the denominator of solution (23) can be written as follows:
Substituting (26) and (27) into (23), we obtain the exact hyperbolic solution:
Moreover, if we rewrite the coefficients
then, we can arrive at the exact periodic solution:
Solution (30) agrees with the corresponding values obtained in Ref. [1] for the advanced Equation 22.
3 Delay equation
It may be useful to divide the domain
where
3.1 Solution in interval
In the interval
The advanced equation in this interval takes the form:
subject to
Substituting (32) into (33) results in the following ODE:
Solving this ODE under Condition (34) yields
where
This integral appears complex; however, it can be evaluated analytically in terms of the generalized incomplete gamma function
The integral (37) can be determined by:
Therefore, the solution (36) takes the following form:
The series on the right-hand side of this equation must also be checked for convergence, which is discussed in the next theorem.
Theorem 2. For
converges in the domain
Proof.Assume that,
Applying the ratio test:
i.e.,
We obtain:
Therefore,
The limit on the right-hand side tends to zero as
3.2 Solution in interval
Let us define
In the interval
The solution to this ODE is as follows:
4 Results
The objective of this section is to extract the numerical results for the convergence of the obtained series solutions for the advanced equation in the interval
and
while
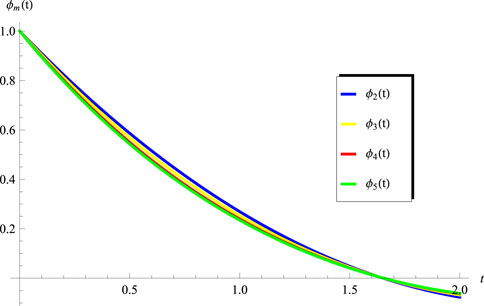
Figure 1. Convergence of approximations
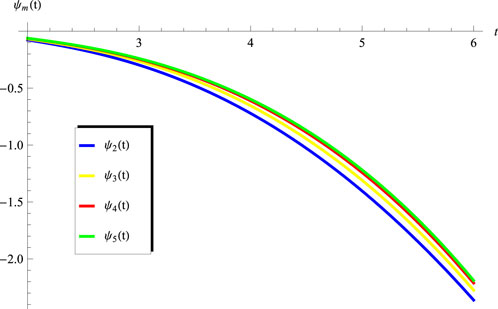
Figure 2. Convergence of approximations
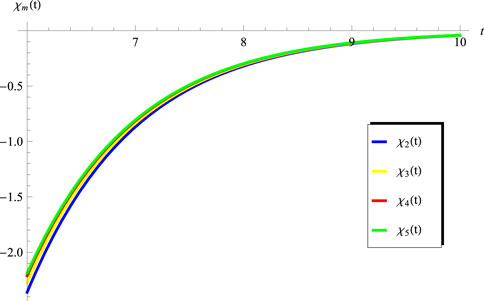
Figure 3. Convergence of approximations
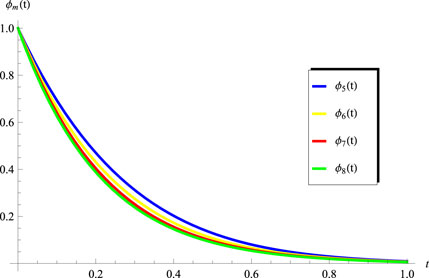
Figure 4. Convergence of approximations
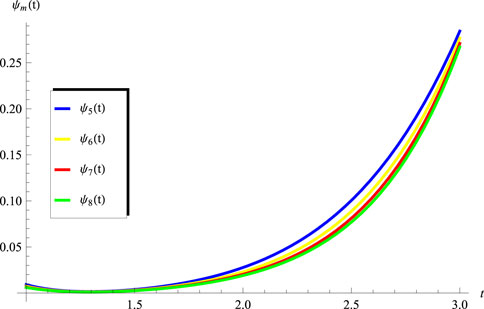
Figure 5. Convergence of approximations
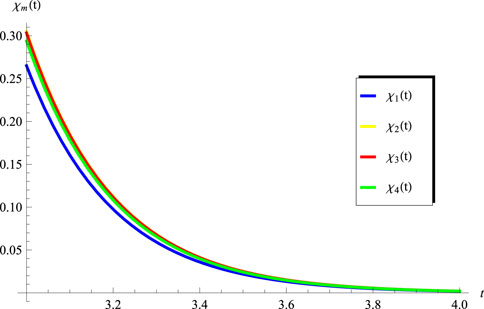
Figure 6. Convergence of approximations
The behavior of the solution in the full domain is depicted in Figures 7, 8 for the same set of values of the constants used to generate Figures 1, 4, respectively. It should be noted that the solutions plotted in Figures 7, 8 are produced using the terms in series (50)–(52).
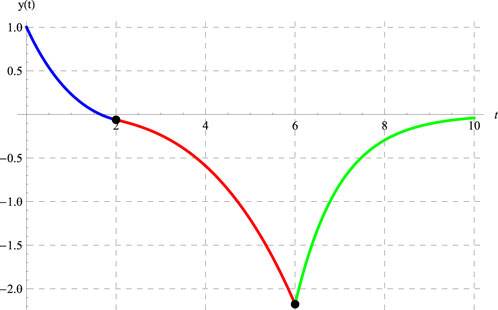
Figure 7. Plot of
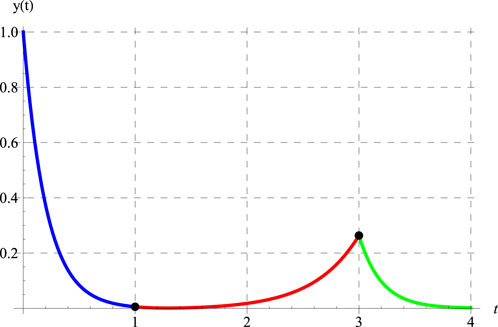
Figure 8. Plot of
The two black dots shown in Figures 7, 8 represent the three intervals
Regarding the continuity of the derivative
This conclusion can be explained theoretically as follows. At
At
Since
5 Conclusion
A new type of differential equation was addressed and solved in this study. The model took the form of SDE,
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author contributions
LS: Conceptualization, Formal Analysis, Funding acquisition, Investigation, Methodology, Project administration, Validation, Writing – review and editing. EE-Z: Conceptualization, Formal Analysis, Investigation, Methodology, Validation, Writing – original draft. AE: Formal Analysis, Investigation, Methodology, Validation, Writing – review and editing. AA: Conceptualization, Data curation, Formal Analysis, Investigation, Methodology, Validation, Writing – original draft.
Funding
The author(s) declare that financial support was received for the research and/or publication of this article. The authors extend their appreciation to Prince Sattam bin Abdulaziz University for funding this research through project number (PSAU/2024/01/31342).
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Generative AI statement
The author(s) declare that no Generative AI was used in the creation of this manuscript.
Any alternative text (alt text) provided alongside figures in this article has been generated by Frontiers with the support of artificial intelligence and reasonable efforts have been made to ensure accuracy, including review by the authors wherever possible. If you identify any issues, please contact us.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
1. Alshomrani NAM, Ebaid A, Aldosari F, Aljoufi MD. On the exact solution of a scalar differential equation via a simple analytical approach. Axioms (2024) 13:129. doi:10.3390/axioms13020129
2. Albidah AB, Alsulami IM, El-Zahar ER, Ebaid A, Advances in mathematical analysis for solving inhomogeneous scalar differential equation[J], AIMS Mathematics, (2024), 9(9): 23331–43. doi:10.3934/math.20241134
3. El-Zahar ER, Ebaid A. Analytical and numerical simulations of a delay model: the pantograph delay equation. Axioms (2022) 11:741. doi:10.3390/axioms11120741
4. Alenazy AHS, Ebaid A, Algehyne EA, Al-Jeaid HK. Advanced study on the delay differential equation y′(t) = ay(t) + by(ct). Mathematics (2022) 10:4302. doi:10.3390/math10224302
5. Andrews HI. Third paper: calculating the behaviour of an overhead catenary system for railway electrification. Proc Inst Mech Eng (1964) 179:809–46. doi:10.1243/pime_proc_1964_179_050_02
6. Gilbert G, Davtcs HEH. Pantograph motion on a nearly uniform railway overhead line. Proc Inst Electr Eng (1966) 113:485–92.
7. Caine PM, Scott PR. Single-wire railway overhead system. Proc Inst Electr Eng (1969) 116:1217–21. doi:10.1049/piee.1969.0226
8. Abbott MR. Numerical method for calculating the dynamic behaviour of a trolley wire overhead contact system for electric railways. Comput J (1970) 13:363–8. doi:10.1093/comjnl/13.4.363
9. Ockendon J, Tayler AB. The dynamics of a current collection system for an electric locomotive, proc. R. Soc. Lond. A math. Phys Eng Sci (1971) 322:447–68.
10. Fox L, Mayers D, Ockendon JR, Tayler AB. On a functional differential equation. IMA J Appl Math (1971) 8:271–307. doi:10.1093/imamat/8.3.271
11. Kato T, McLeod JB. The functional-differential equation y′(x) = ay(λx) + by(x). Bull Am Math Soc (1971) 77:891–935.
12. Iserles A. On the generalized pantograph functional-differential equation. Eur J Appl Math (1993) 4:1–38. doi:10.1017/s0956792500000966
13. Ambartsumian VA. On the fluctuation of the brightness of the milky way. Doklady Akad Nauk USSR (1994) 44:223–6.
14. Patade J, Bhalekar S. On analytical solution of Ambartsumian equation. Natl Acad Sci Lett (2017) 40:291–3. doi:10.1007/s40009-017-0565-2
15. Alyoubi RMS, Ebaid A, El-Zahar ER, Aljoufi MD. A novel analytical treatment for the Ambartsumian delay differential equation with a variable coefficient[J]. AIMS Mathematics, (2024), 9(12): 35743–58. doi:10.3934/math.20241696
16. Ebaid A, Cattani C, Al Juhani AS, El-Zahar ER. A novel exact solution for the fractional Ambartsumian equation. Adv Differ Equ (2021) 88:88. doi:10.1186/s13662-021-03235-w
17. Adomian G. Solving frontier problems of physics: the decomposition method. Boston, MA, USA: Kluwer Acad (1994).
18. Wazwaz AM. Adomian decomposition method for a reliable treatment of the Bratu-type equations. Appl Math Comput (2005) 166:652–63. doi:10.1016/j.amc.2004.06.059
19. Duan JS, Rach R. A new modification of the Adomian decomposition method for solving boundary value problems for higher order nonlinear differential equations. Appl Math Comput (2011) 218:4090–118. doi:10.1016/j.amc.2011.09.037
20. Li W, Pang Y. Application of Adomian decomposition method to nonlinear systems. Adv Differ Equ (2020) 2020:67. doi:10.1186/s13662-020-2529-y
21. Ayati Z, Biazar J. On the convergence of homotopy perturbation method. J Egypt Math Soc (2015) 23:424–8. doi:10.1016/j.joems.2014.06.015
22. Albidah AB, Kanaan NE, Ebaid A, Al-Jeaid HK. Exact and numerical analysis of the pantograph delay differential equation via the homotopy perturbation method. Mathematics (2023) 11:944. doi:10.3390/math11040944
23. Khaled SM. The exact effects of radiation and joule heating on magnetohydrodynamic marangoni convection over a flat surface. Therm Sci (2018) 22:63–72. doi:10.2298/tsci151005050k
24. Khaled SM. Exact solution of the one-dimensional neutron diffusion kinetic equation with one delayed precursor concentration in Cartesian geometry. AIMS Mathematics, (2022), 7(7): 12364–73. doi:10.3934/math.2022686
25. Alrebdi R, Al-Jeaid HK. Accurate solution for the pantograph delay differential equation via laplace transform. Mathematics (2023) 11:2031. doi:10.3390/math11092031
26. Alrebdi R, Al-Jeaid HK. Two different analytical approaches for solving the pantograph delay equation with variable coefficient of exponential order. Axioms (2024) 13:229. doi:10.3390/axioms13040229
27. Chi H, Bell J, Hassard B. Numerical solution of a nonlinear advance-delay differential equation from nerve conduction theory. J Math Biol (1986) 5:583–601. doi:10.1007/BF00275686
28. Sun W, Jin Y, Lu G. Genuine multipartite entanglement from a thermodynamic perspective. Phys Rev A (2024) 109(4):042422. doi:10.1103/PhysRevA.109.042422
29. Yang Y, Li H. Neural ordinary differential equations for robust parameter estimation in dynamic systems with physical priors. Appl Soft Comput (2024) 169:112649. doi:10.1016/j.asoc.2024.112649
30. Ma P, Yao T, Liu W, Pan Z, Chen Y, Yang H. A 7-kW narrow-linewidth fiber amplifier assisted by optimizing the refractive index of the large-mode-area active fiber. High Pow Laser Sci Eng (2024). 12, e67. doi:10.1017/hpl.2024.41
31. Shi Q, Wang S, Yang J. Small parameters analysis applied to two potential issues for maxwell-schrödinger system. J Differential Equations (2025) 424:637–59. doi:10.1016/j.jde.2025.01.049
32. Jiang N, Feng Q, Yang X, He J-R, Li B-Z. The octonion linear canonical transform: properties and applications. Chaos, Solitons and Fractals (2025) 192:116039. doi:10.1016/j.chaos.2025.116039
33. Rekkab S, Benhadid S, Al-Saphory R. An asymptotic analysis of the gradient remediability problem for disturbed distributed linear systems. Baghdad Sci J (2022) 19(6):1623–35. doi:10.21123/bsj.2022.6611
34. Al-Saphory R, Khalid Z, El Jai A. Regional boundary gradient closed loop control system and Γ*AGFO-Observer. J Phys Conf Ser (2020) 1664(1):012061. doi:10.1088/1742-6596/1664/1/012061
Keywords: scalar differential equation, ordinary differential equation, delayed differential equation, advanced differential equation, series. MSC, 34K06, 34K07, 65L03
Citation: Seddek LF, El-Zahar ER, Ebaid A and Al Qarni AA (2025) Treatment of a generalized scalar differential equation: analysis and explicit solution. Front. Phys. 13:1611846. doi: 10.3389/fphy.2025.1611846
Received: 14 April 2025; Accepted: 04 August 2025;
Published: 01 September 2025.
Edited by:
Khursheed Alam, Sharda University, IndiaReviewed by:
Njitacke Tabekoueng Zeric, University of Buea, CameroonRaheam Al-Saphory, Mustansiriyah University, Iraq
Kameshwar Sahani, Kathmandu University School of Engineering Dhulikhel Nepal, Nepal
Copyright © 2025 Seddek, El-Zahar, Ebaid and Al Qarni. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Abdelhalim Ebaid, YWViYWlkQHV0LmVkdS5zYQ==