 Xi Xia*
Xi Xia* Lingyun Shangguan
Lingyun Shangguan- School of Mechanical Engineering, Shanghai Jiao Tong University, Shanghai, China
This study employs potential flow theory with a discrete-vortex method to model the unsteady aerodynamics of a flat plate, with a particular focus on the coupled dynamics of leading-edge and trailing-edge vortices (LEVs and TEVs). Through the simulation of an impulsively starting plate at 45
1 Introduction
Research in low-Reynolds-number unsteady aerodynamics has been profoundly influenced by studies of insect flight and flapping wings, motivated by the remarkable lift-generating capabilities observed in these biological systems [1–5]. Early experimental investigations employing flow visualization techniques [6–8] revealed that lift enhancement is fundamentally linked to unsteady wing motion, which promotes the formation and maintenance of a stable leading-edge vortex (LEV). Such an LEV exhibits significantly greater stability than its steady-flow counterpart, resulting in delayed vortex shedding and stall [9–13].
The theoretical explanation of lift enhancement via vortex attachment traces back to Saffman & Sheffield [14], who employed two-dimensional (2D) potential flow theory to demonstrate that a steady flow over a wing with an attached vortex produces increased lift. Subsequent developments by Chow & Huang [15] and Mourtos & Brooks [16] extended this framework to account for airfoil thickness, camber, and spanwise flow effects. These early studies have established that vortex stabilization on the upper airfoil surface provides enhanced lift, based on the assumption that the vortex remains stabilized at an equilibrium position for Kutta–Joukowski lift calculations. The stabilization mechanism of the LEV was first investigated by Rossow [17], who introduced a point sink at the vortex core to model the effects of spanwise flow on vorticity transport. This formulation enabled quasi-steady modeling of vortex dynamics through a linear system framework, permitting evaluation of vortex equilibrium and stability characteristics; however, the analysis ultimately failed to demonstrate LEV stabilization. Most recently, Xia & Mohseni [18] resolved this issue by replacing the point sink with a finite-area sink, allowing fully coupled vortex-sink interactions. This modification enabled the first mathematical proof of LEV stabilization under conditions of spanwise vorticity transport. However, the quasi-steady formulation inherently neglects the unsteady characteristics of flapping wings, including the dynamic vortex formation and shedding processes.
Subsequent modeling efforts have focused on resolving the unsteady dynamics of flapping wings through vortex methods to better capture wake evolution and lift generation mechanisms. Significant improvements in unsteady aerodynamic modeling have been achieved through high-fidelity resolution of wake vorticity distributions, implemented via two primary approaches, the discrete-vortex methods [19–26] and the continuous vortex sheet/panel techniques [27–30]. In particular, Ansari et al.s model [22, 31] showed good agreement in both force predictions and wake development in comparison with previous experimental results [1, 32]. Recent advances in these frameworks have yielded accurate predictions of both wake vortex dynamics and unsteady aerodynamic forces, particularly through the development of theoretical formulations for rotating flat plates [23] and arbitrary airfoil geometries [26, 33] as well as fundamental criteria for vortex shedding, including the leading-edge suction parameter [24] and generalized unsteady Kutta conditions [26, 34–36].
The continuous introduction of new vortex elements into the wake leads to progressively increasing computational costs. Alternatively, the complexity of the wake system can be significantly reduced by modeling only the main vortex cores with individual point vortices. Specifically, attached vortices with varying circulations are evolved based on the Brown–Michael equation [37], which essentially requires the vortex force to be conserved for a growing vortex. And detached vortices are treated as freely-advected vortices with frozen circulations. For example, Michelin & Smith [38] applied this approach to modeling vortex shedding dynamics of multi-edge bodies, while Wang & Eldredge [39] developed a two-vortex model for coupled LEV–TEV dynamics, incorporating an impulse-matching scheme to eliminate nonphysical force jumps during vortex shedding. However, the single-vortex models are over-simplified in resolving near-field vortical structures of complicate geometries, leading to inaccuracies in both vortex evolution and force predictions. A more fundamental limitation is the absence of physical criteria for vortex shedding timing, which constrains the models’ ability to capture long-term wake development. Recently, Darakananda & Eldredge [40] and Dumoulin et al. [33] developed a hybrid low-order vortex method that combines near-field vortex sheet resolution with far-field representation by a limited number of detached point vortices, where the transition between these representations is governed by a threshold condition based on vortex force discrepancy. However, this approach remains imperfect from a physical perspective, as the detachment of point vortices does not fully align with the natural timing of coherent vortex formation and shedding in the wake.
This work is focused on further exploring model reduction based on our previous unsteady aerodynamic model of a flat plate [23]. Our reduction approach here was inspired by Spalart [41] and Ansari et al. [22] who implemented vortex merge/amalgamation schemes based on minimizing velocity variation at the far field away from the merging site. However, in addition to their merging principle, we propose that the merge process should also conserve the total momentum of all vortices involved so as to prevent spurious force generation. Through comparisons with experiment, single-vortex models, and the original discrete-vortex model, we aim to demonstrate the computational efficiency and accuracy of the present model for possible low-order applications.
2 Theoretical approach
To investigate unsteady aerodynamics of a 2D flat plate, the present study employs the unsteady potential flow model developed by Xia & Mohseni [23], with discrete vortices introduced to capture the shear layer dynamics and vortex shedding behaviors at both the leading and trailing edges, as illustrated in Figure 1. This framework entails the default assumption of inviscid, incompressible 2D flow, which has several limitations. For example, it is unable to capture three-dimensional effects, such as vortex breakdown and tip vortex that are essential to a low-aspect-ratio wing. Furthermore, the viscous effects cannot be sufficiently resolved. Although vortex formation and shedding can be predicted using unsteady Kutta condition, major uncertainties could arise due to its inability to account for the formation of boundary layer and the viscous diffusion of shear layer and vortex core. Nevertheless, in terms of reduced-order modeling, potential flow still has its own advantage. In particular, it gives explicit expression of the flow field without solving the Navier–Stokes equation, thereby providing a mathematical foundation for analyzing the vortex dynamics while maintaining computational tractability. Combined with the discrete-vortex method, it is able to offer reasonably accurate predictions of the wake vortex evolutions and aerodynamic forces, especially the lift resulting from vortex circulation.
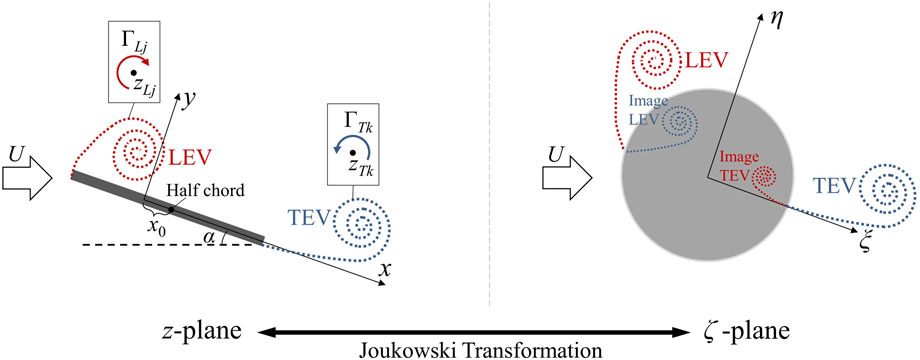
Figure 1. Diagram illustrating the unsteady potential flow model of a 2D flat plate, with discrete vortices shedding from the leading and trailing edges. The flow in the physical
2.1 Unsteady potential flow model
We start by introducing the unsteady potential flow model in Figure 1, where the flow around a flat plate in the laboratory coordinate system (denoted as the
where
Considering the background flow and the vortex singularities in Figure 1, we may apply the rule of superposition and the circle theorem [42] to express the complex potential in
where the first two terms account for the translational motion of the plate, while the last two terms describe the induced effects of the discrete vortices associated with the LEVs and TEVs, including those from their image vortices within the cylinder. Here,
The evaluation of Equation 2 requires precise determination of both circulations and positions for all discrete point vortices. For the circulation, each vortex element generating from either the leading or trailing edge is assigned a strength governed by the classical steady-state Kutta condition:
This condition enforces stagnation points at the edges of the cylinder in the
where
Once generated, the vortices in the wake are assumed to hold constant circulations, as dictated by the Helmholtz’s laws of vortex motion. However, the spatial evolution of a vortex follows Lagrangian advection via a de-singularized velocity (for a point vortex
The final term of Equation 5 represents the Routh correction [44, 45], accounting for the self-induced velocity due to the vortex’s interaction with its image vortex in the cylinder. An analogous expression for a vortex
Based on the potential flow model, the unsteady aerodynamic force can be calculated by employing the unsteady Bernoulli equation and then computing the unsteady Blasius integrals [23], which gives
where
2.2 Vortex merge algorithm
In the potential flow model, the incorporation of the discrete-vortex method enables the tracking of wake vortex evolution and the estimation of unsteady aerodynamic forces arising from vortex motion. However, as vortices are continuously introduced into the flow field at each time step, the computational cost escalates and the efficiency degrades significantly over time or with reduced time steps owing to the accumulating vortex population. A critical question thus arises: can a vortex merge algorithm be devised to amalgamate proximate vortices, thereby improving computational efficiency without compromising much simulation fidelity? To address this, we focus on the most basic scenario of a double-vortex system and propose two physical hypotheses governing the merging process:
(i) The merging process must obey the basic conservations of circulation and momentum.
(ii) The global flow field should remain largely unaffected by the merging.
Based on the preceding analysis, the merging process of two point vortices with circulations
where
where
where
This result reveals that the merged vortex’s position
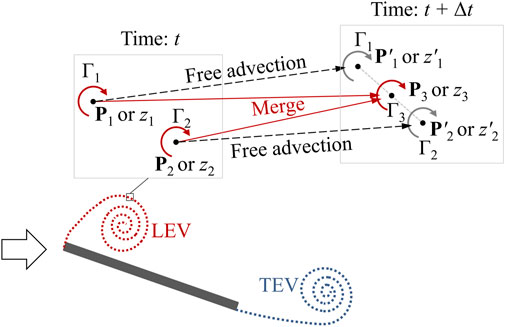
Figure 2. Merging process of two point vortices. Initially, the two vortices (of circulations
Regarding hypothesis (ii), while the change in velocity induction inevitably introduces some near-field disturbances—making complete neutrality impossible—this hypothesis can be relaxed to a problem-specific condition. In this study, as aerodynamic forces are of primary interest, which result from the interactions between the plate and the wake vortices as indicated from Equation 6), this condition can be established based on minimizing the change in velocity induction exerted by the vortex system on the plate surface. To establish such a condition, we consider the induced velocity at
By further applying the Taylor expansion to the first two terms at
where the convergence of the Taylor series requires
Combining Equations 11, 13 and neglecting the small-order terms yield
where
3 Results and discussion
The unsteady potential flow framework with discrete vortices has been demonstrated to yield accurate predictions of both wake evolutions and unsteady lift variations in the previous work [23]. The present study extends this analysis by examining two key aspects: (1) the physical mechanisms underlying different contributions to unsteady lift generation on an impulsively starting plate, and (2) the efficacy of the proposed vortex merge algorithm for model reduction.
3.1 Contributions to unsteady lift generation
The lift generation mechanisms are investigated through simulating an impulsively starting flat plate experiment, originally conducted by Dickinson and Gotz [32]. The flat plate has a chord length of 5 cm with an angle of attack fixed at 45
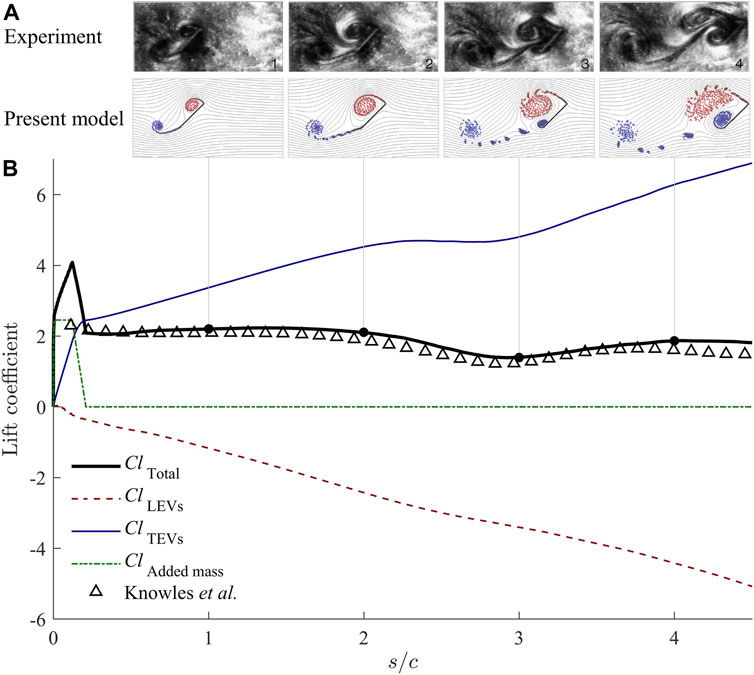
Figure 3. (A) Flow visualization images (top) of a starting plate at
Next, the predicted lift coefficient is compared with validated CFD results (Re = 250) from Knowles et al. [47] in Figure 3B, showing overall good agreement. For more validation cases, the interested readers are referred to our previous works that have demonstrated the performance of this discrete vortex model in predicting the wake structures and aerodynamic/hydrodynamic forces of not only the staring or the pitching plates [23] but also NACA-series airfoils with various prescribed swimming motions [26]. Here, the lift coefficient is computed using Equation 6 based on the total force component of
It should be emphasized that this result provides important physical insights into vortex-dominated unsteady lift generation mechanisms, which has intrinsic connections to insect flight. While previous experimental observations have reported the prominent correlation between significant lift enhancement and a stabilized LEV, our analysis reveals that this phenomenon should not be attributed to the LEV alone. In fact, the apparent LEV ‘stabilization’ likely reflects its slower advective velocity relative to the TEV. Our findings from Figure 3 suggest that the positive net lift arises from a balance between vortex contributions—the faster shedding TEV provides substantial positive lift while the LEV with a slower downstream advection generates comparatively weaker negative lift. From a vortex dynamics perspective, the characteristic stall behavior occurs when the feeding shear layer of the primary TEV ruptures, thereby inhibiting the shear layer’s downstream advection and further reducing positive lift generation from the newly formed TEV. Detailed flow analysis reveals that this transition stems from LEV–TEV interactions. As evident in Figure 3, the growing LEV extends to the trailing edge after
Despite the overall promising performance demonstrated through this simple case, the present discrete-vortex model has an inherent limitation in handling viscous diffusion, which is associated with the growth of shear layer thickness or the spreading of vortex core. Specifically, viscosity can influence the redistribution of vorticity inside the LEV, thereby rendering the model inaccurate in capturing the vortex core location, which could further affect force predictions. Furthermore, viscosity also plays an important role in the vortex-surface interaction. As the LEV or TEV approaches the plate surface, the vortex circulation would decay owing to vorticity annihilation between the vortex and its induced shear layer along the surface, which is of opposite-sign vorticity; similar effect is also prominent in the interaction of an LEV–TEV couple. Without resolving such effects, the potential flow model likely over-predicts the vortex circulation, which could affect not only the magnitude of the force calculation but also the timings for vortex roll-up and shedding, causing uncertainties in predicting the long-term evolutions.
3.2 Reduced-order model performance
The growing complexity of discrete-vortex systems in long-duration or small-time-step simulations necessitates model simplification. This study explores the vortex amalgamation scheme, based on applying the merging criterion established in Section 3 to systematically reduce the discrete vortex population while preserving the main vortex dynamics. The performance of this approach is quantified by comparing the variations of lift coefficient, flow field pattern, and the vortex population with alternative reduced-order models.
Before presenting the simulation results obtained based on discrete-vortex merging, we first examine the performance of single-vortex models to offer references for both wake capture and lift estimation of the starting-plate problem. The analysis here serves two purposes. One is to assess whether the over-simplified single-vortex representations can adequately capture the flow field and vortex dynamics; the other is to provide context for evaluating the newly proposed amalgamation approach. Here, four different models are implemented, including a baseline model named the ‘discrete-vortex’, which refers to the original discrete-vortex model without any reduction, and three single-vortex models, namely, ‘single-LEV’, ‘single-TEV’, and ‘single-LEV&TEV’. For the single-vortex representations, each model employs a single point vortex of constant circulation to account for either the primary LEV, the primary TEV, or both. It should be mentioned that, in previous single-vortex models [38, 39], the vortex circulation was treated as a time-dependent variable, with its location evolved based on the Brown–Michael equation [37]. However, our implementation here has two key distinctions. First, we introduce one more point vortex near the shedding edges, in addition to the main vortex, to represent the effect of the feeding shear layer. Furthermore, new vortices are continuously introduced at each time step to model the vorticity feeding of the shear layer, meanwhile the preceding vortex in the feeding shear layer is merged into the main vortex; the position of the merged LEV is determined by Equation 11 that was derived based on the momentum conservation. In this way, our approach is consistent with the essence of the Brown–Michael equation while offering greater authority in capturing the dynamics of the feeding shear layer, which has crucial influences on the vorticity generation and vortex shedding conditions at the edges.
To implement the single-vortex models, all cases are initialized with the ‘discrete-vortex’ setting during the first chord length of travel. At
The simulated flow fields and wake patterns are presented in Figure 4, which enables quantitative evaluation of the single-vortex methods through direct comparison with the ‘discrete-vortex’ model (benchmark) at representative flow evolution stages. The ‘single-LEV’ demonstrates qualitative agreement with the ‘discrete-vortex’ results up to
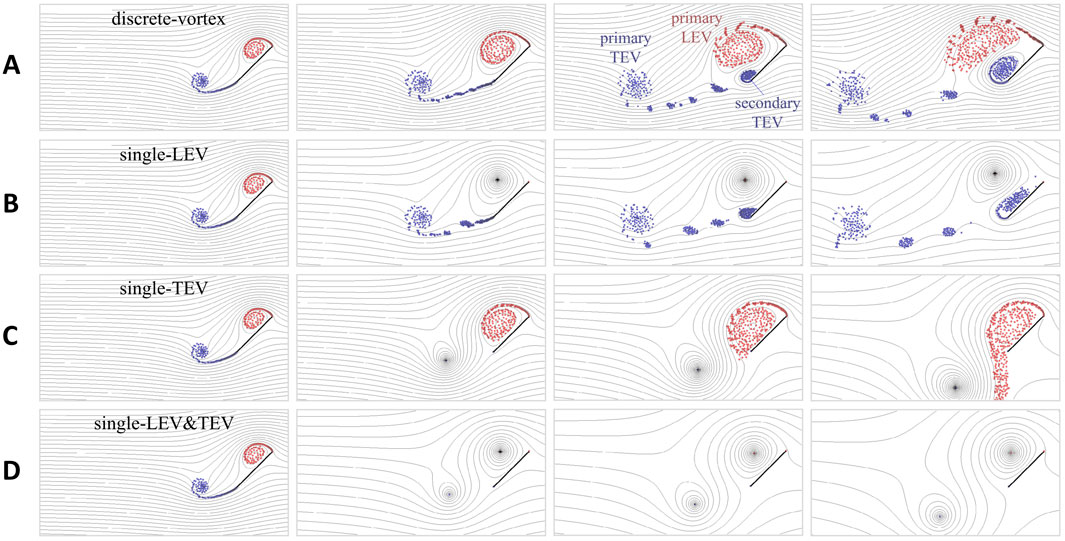
Figure 4. Snapshots of simulated flow field at 1–4 chord lengths of travel. The result of (A) the ‘discrete-vortex’ model serves as a benchmark, which is compared with those of three single-vortex models: (B) ‘single-LEV’, (C) ‘single-TEV’, and (D) ‘single-LEV&TEV’.
Figure 5A further compares the lift calculations corresponding to the simulated results in Figure 4. For a more comprehensive assessment of the different models, the total circulations of both the LEV and TEV as well as the horizontal positions
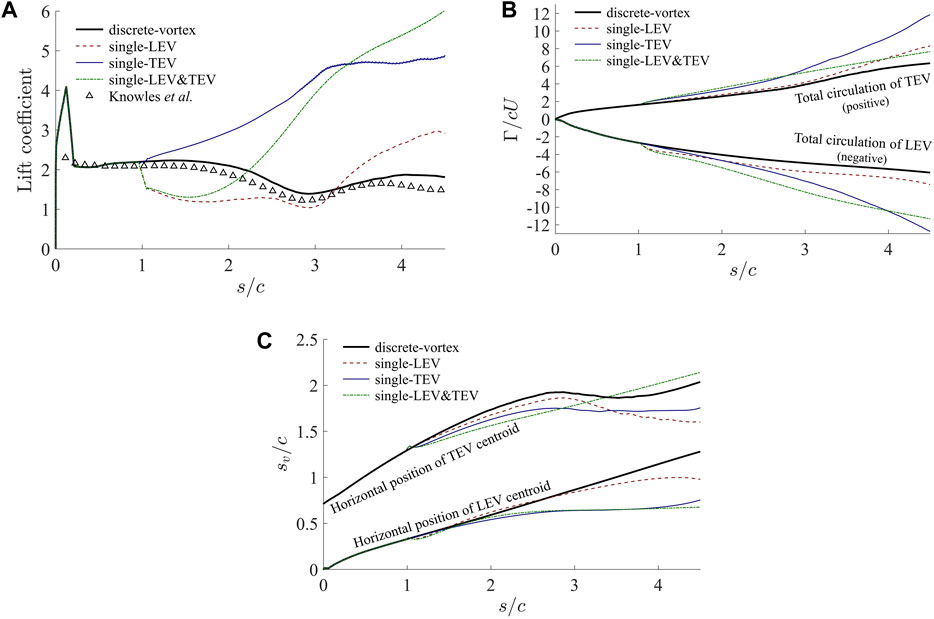
Figure 5. Comparisons of (A) unsteady lift coefficient, (B) vortex circulation, and (C) horizontal locations of vortex centroid predicted by the ‘discrete-vortex’ model with the single-vortex models, corresponding to the different cases in Figure 4. Knowles et al.s CFD result [47] is plotted as a reference in (A).
Based on the data in Figure 5, the performance of the three single-vortex models are further assessed quantitatively in Table 1 via computing the mean absolute errors (MAEs) of five variables, including the lift coefficient
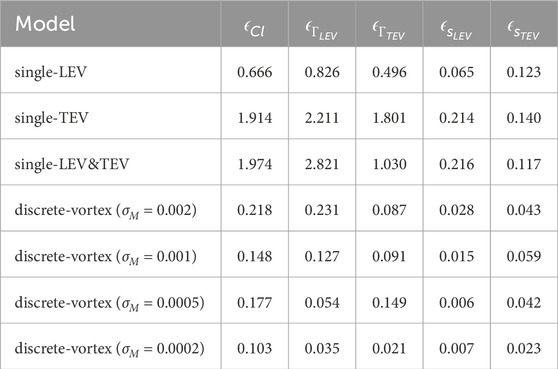
Table 1. Mean absolute errors (MAE) of
Next, we investigate the performance of the vortex merging scheme based on the discrete-vortex framework. The parameter
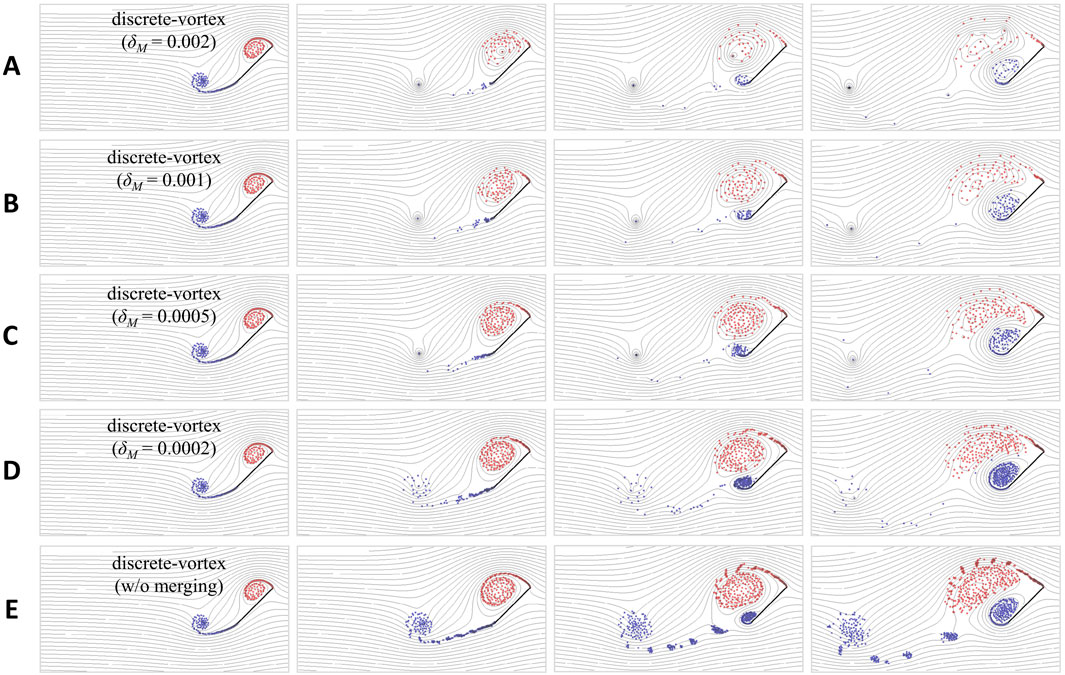
Figure 6. Snapshots of simulated flow field at 1–4 chord lengths of travel. The ‘discrete-vortex’ results with different vortex-merge levels (A–D) are compared with (E) the benchmark case without merging. For the cases employing the proposed merge scheme, the merging criterion
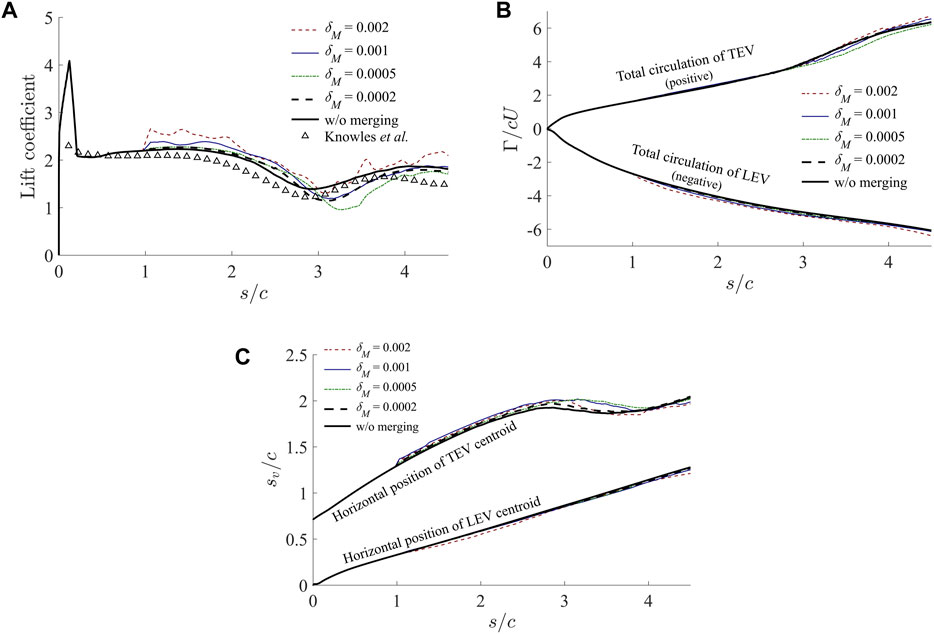
Figure 7. Comparisons of (A) unsteady lift coefficient, (B) vortex circulation, and (C) horizontal locations of vortex centroid predicted by the ‘discrete-vortex’ model with various settings for vortex merging, corresponding to the different cases in Figure 6. Knowles et al.s CFD result [47] is plotted as a reference in (A).
Last, to assess effectiveness of the vortex merge algorithm in reducing the system’s complexity, the evolutions of the discrete vortex population are compared in Figure 8, with
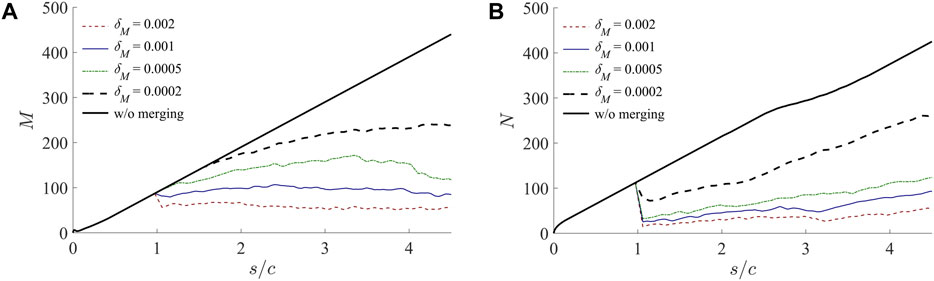
Figure 8. Comparison of vortex population among ‘discrete-vortex’ models of different vortex-merge levels gauged by
Before closing, it is worth discussing the practical choice of
4 Conclusion
This study employs the potential flow theory to examine the aerodynamics of a flat plate undergoing unsteady translational motion at an angle-of-attack of 45
To improve computational efficiency while preserving physical fidelity, a vortex merge scheme is developed based on two physical assumptions for the merging process: (i) conservations of circulation and momentum and (ii) negligible velocity difference induced on the plate surface. The latter ensures a sufficient accuracy in resolving vortex-plate interactions, especially in the critical near-plate region where vortex-induced effects dominate. The efficacy of the proposed reduced-order model is evaluated in comparison with the single-vortex models as well as the original discrete-vortex model without reduction. The analysis of the single-vortex models serves as a reference to demonstrate their limitations in accurately resolving the near-field wake, when a distributed vorticity field is replaced by a single vortex. In contrast, the vortex merge algorithm developed in this study exhibits substantially improved performance, which is able to accurately capturing both flow field evolution and lift generation while maintaining computational efficiency; the balance between computation precision and cost can be adjusted through a threshold merge parameter
Data availability statement
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
Author contributions
XX: Conceptualization, Investigation, Writing – review and editing, Formal Analysis, Writing – original draft. LS: Writing – review and editing, Formal Analysis, Visualization.
Funding
The author(s) declare that financial support was received for the research and/or publication of this article. The authors gratefully acknowledge the financial support from the National Natural Science Foundation of China (nos. 12072194, 22227901, and 52006139).
Acknowledgments
The authors would like to acknowledge the valuable insights and comments offered by Prof. Kamran Mohseni.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Generative AI statement
The author(s) declare that no Generative AI was used in the creation of this manuscript.
Any alternative text (alt text) provided alongside figures in this article has been generated by Frontiers with the support of artificial intelligence and reasonable efforts have been made to ensure accuracy, including review by the authors wherever possible. If you identify any issues, please contact us.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
1. Dickinson MH, Lehmann FO, Sane SP. Wing rotation and the aerodynamic basis of insect flight. Science (1999) 284:1954–60. doi:10.1126/science.284.5422.1954PubMed Abstract | CrossRef Full Text | Google Scholar
2. Shyy W, Lian Y, Tang J, Viieru D, Liu H. Aerodynamics of low Reynolds number flyers. New York, NY (2008). doi:10.1017/CBO9780511551154CrossRef Full Text | Google Scholar
3. Liu G, Dong H, Li C. Vortex dynamics and new lift enhancement mechanism of wing–body interaction in insect forward flight. J Fluid Mech (2016) 795:634–51. doi:10.1017/jfm.2016.175CrossRef Full Text | Google Scholar
4. Bomphrey R, Nakata T, Phillips N, Walker S. Smart wing rotation and trailing-edge vortices enable high frequency mosquito. Nature (2017) 544:92–5. doi:10.1038/nature21727PubMed Abstract | CrossRef Full Text | Google Scholar
5. Oh S, Lee B, Park H, Choi H, Kim ST. A numerical and theoretical study of the aerodynamic performance of a hovering rhinoceros beetle (Trypoxylus dichotomus). J Fluid Mech (2020) 885:A18. doi:10.1017/jfm.2019.962CrossRef Full Text | Google Scholar
6. Ellington C, van der Berg C, Willmott A, Thomas A. Leading-edge vortices in insect flight. Nature (1996) 384:626–30. doi:10.1038/384626a0CrossRef Full Text | Google Scholar
7. van den Berg C, Ellington CP. The three-dimensional leading-edge vortex of a ‘hovering’ model hawkmoth. Phil Trans R Soc Lond B (1997) 352:329–40. doi:10.1098/rstb.1997.0024CrossRef Full Text | Google Scholar
8. Willmott AP, Ellington CP, Thomas ALR. Flow visualization and unsteady aerodynamics in the flight of the hawkmoth Manduca sexta. Phil Trans R Soc Lond B (1997) 352:303–16. doi:10.1098/rstb.1997.0022CrossRef Full Text | Google Scholar
9. Maxworthy T. The fluid dynamics of insect flight. Ann Rev Fluid Mech (1981) 13:329–50. doi:10.1146/annurev.fl.13.010181.001553CrossRef Full Text | Google Scholar
10. Ellington CP. The aerodynamics of hovering insect flight. IV. Aerodynamic mechanisms. Phil Trans R Soc Lond B (1984) 305:79–113. doi:10.1098/rstb.1984.0052CrossRef Full Text | Google Scholar
11. Birch JM, Dickinson MH. Spanwise flow and the attachment of the leading-edge vortex on insect wings. Nature (2001) 412:729–33. doi:10.1038/35089071PubMed Abstract | CrossRef Full Text | Google Scholar
12. DeVoria AC, Mohseni K. On the mechanism of high-incidence lift generation for steadily translating low-aspect-ratio wings. J Fluid Mech (2017) 813:110–26. doi:10.1017/jfm.2016.849CrossRef Full Text | Google Scholar
13. Linehan T, Mohseni K. On the maintenance of an attached leading-edge vortex via model bird alula. J Fluid Mech (2020) 897:A17. doi:10.1017/jfm.2020.364CrossRef Full Text | Google Scholar
14. Saffman PG, Sheffield JS. Flow over a wing with an attached free vortex. Stud Appl Math (1977) 57:107–17. doi:10.1002/sapm1977572107CrossRef Full Text | Google Scholar
15. Huang MK, Chow CY. Trapping of a free vortex by Joukowski airfoils. AIAA J (1982) 20:292–8. doi:10.2514/3.7913CrossRef Full Text | Google Scholar
16. Mourtos NJ, Brooks M. Flow past a flat plate with a vortex/sink combination. J Appl Mech (1996) 63:543–50. doi:10.1115/1.2788902CrossRef Full Text | Google Scholar
17. Rossow V. Lift enhancement by an externally trapped vortex. J Aircr (1978) 15:618–25. doi:10.2514/3.58416CrossRef Full Text | Google Scholar
18. Xia X, Mohseni K. A theory on leading-edge vortex stabilization by spanwise flow. J Fluid Mech (2023) 970:R1. doi:10.1017/jfm.2023.613CrossRef Full Text | Google Scholar
19. Katz J. A discrete vortex method for the non-steady separated flow over an airfoil. J Fluid Mech (1981) 102:315–28. doi:10.1017/S0022112081002668CrossRef Full Text | Google Scholar
20. Streitlien K, Triantafyllou MS. Force and moment on a joukowski profile in the presence of point vortices. AIAA J (1995) 33:603–10. doi:10.2514/3.12621CrossRef Full Text | Google Scholar
21. Yu Y, Tong B, Ma H. An analytic approach to theoretical modeling of highly unsteady viscous flow excited by wing flapping in small insects. Acta Mech Sin (2003) 19:508–16. doi:10.1007/BF02484543CrossRef Full Text | Google Scholar
22. Ansari SA, Zbikowski R, Knowles K. Non-linear unsteady aerodynamic model for insect-like flapping wings in the hover. part 2: implementation and validation. Proc Inst Mech Eng G (2006) 220:169–86. doi:10.1243/09544100JAERO50CrossRef Full Text | Google Scholar
23. Xia X, Mohseni K. Lift evaluation of a two-dimensional pitching flat plate. Phys Fluids (2013) 25:091901. doi:10.1063/1.4819878CrossRef Full Text | Google Scholar
24. Ramesh K, Gopalarathnam A, Granlund K, Ol MV, Edwards JR. Discrete-vortex method with novel shedding criterion for unsteady aerofoil flows with intermittent leading-edge vortex shedding. J Fluid Mech (2014) 751:500–38. doi:10.1017/jfm.2014.297CrossRef Full Text | Google Scholar
25. Li J, Wu Z. Unsteady lift for the Wagner problem in the presence of additional leading/trailing edge vortices. J Fluid Mech (2015) 769:182–217. doi:10.1017/jfm.2015.118CrossRef Full Text | Google Scholar
26. Xia X, Mohseni K. Unsteady aerodynamics and vortex-sheet formation of a two-dimensional airfoil. J Fluid Mech (2017) 830:439–78. doi:10.1017/jfm.2017.513CrossRef Full Text | Google Scholar
27. Jones MA. The separated flow of an inviscid fluid around a moving flat plate. J Fluid Mech (2003) 496:405–41. doi:10.1017/S0022112003006645CrossRef Full Text | Google Scholar
28. Pullin DI, Wang ZJ. Unsteady forces on an accelerating plate and application to hovering insect flight. J Fluid Mech (2004) 509:1–21. doi:10.1017/S0022112004008821CrossRef Full Text | Google Scholar
29. Shukla RK, Eldredge JD. An inviscid model for vortex shedding from a deforming body. Theor Comput Fluid Dyn (2007) 21:343–68. doi:10.1007/s00162-007-0053-2CrossRef Full Text | Google Scholar
30. DeVoria AC, Mohseni K. Vortex sheet roll-up revisited. J Fluid Mech (2018) 855:299–321. doi:10.1017/jfm.2018.663CrossRef Full Text | Google Scholar
31. Ansari SA, Zbikowski R, Knowles K. Non-linear unsteady aerodynamic model for insect-like flapping wings in the hover. part 1. methodology and analysis. Proc Inst Mech Eng G (2006) 220:61–83. doi:10.1243/09544100JAERO49CrossRef Full Text | Google Scholar
32. Dickinson MH, Gotz KG. Unsteady aerodynamic performance of model wings at low Reynolds numbers. J Exp Biol (1993) 174:45–64. doi:10.1242/jeb.174.1.45CrossRef Full Text | Google Scholar
33. Dumoulin D, Eldredge JD, Chatelain P. A lightweight vortex model for unsteady motion of airfoils. J Fluid Mech (2023) 977:A22. doi:10.1017/jfm.2023.997CrossRef Full Text | Google Scholar
34. DeVoria AC, Mohseni K. The vortex-entrainment sheet in an inviscid fluid: theory and separation at a sharp edge. J Fluid Mech (2019) 866:660–88. doi:10.1017/jfm.2019.134CrossRef Full Text | Google Scholar
35. Taha H, Rezaei AS. Viscous extension of potential-flow unsteady aerodynamics: the lift frequency response problem. J Fluid Mech (2019) 868:141–75. doi:10.1017/jfm.2019.159CrossRef Full Text | Google Scholar
36. Zhu W, McCrink MH, Bons JP, Gregory JW. The unsteady kutta condition on an airfoil in a surging flow. J Fluid Mech (2020) 893:R2. doi:10.1017/jfm.2020.254CrossRef Full Text | Google Scholar
37. Brown CE, Michael WH. Effect of leading-edge separation on the lift of a delta wing. J Astronaut Sci (1954) 21:690–4. doi:10.2514/8.3180CrossRef Full Text | Google Scholar
38. Michelin S, Smith SGL. An unsteady point vortex method for coupled fluid-solid problems. Theor Comput Fluid Dyn (2009) 23:127–53. doi:10.1007/s00162-009-0096-7CrossRef Full Text | Google Scholar
39. Wang C, Eldredge JD. Low-order phenomenological modeling of leading-edge vortex formation. Theor Comput Fluid Dyn (2013) 27:577–98. doi:10.1007/s00162-012-0279-5CrossRef Full Text | Google Scholar
40. Darakananda D, Eldredge JD. A versatile taxonomy of low-dimensional vortex models for unsteady aerodynamics. J Fluid Mech (2019) 858:917–48. doi:10.1017/jfm.2018.792CrossRef Full Text | Google Scholar
41. Spalart P. Direct numerical simulation of a turbulent boundary layer up to rθ = 1410. J Fluid Mech (1988) 187:61–98. doi:10.1017/s0022112088000345CrossRef Full Text | Google Scholar
43. Mason RJ. Fluid locomotion and trajectory planning for shape-changing robots. Pasadena, CA: California Institute of Technology (2002). Ph.D. thesis.
44. Lin CC. On the motion of vortices in two dimensions-I. existence of the Kirchhoff-Routh function. Proc Natl Acad Sci (1941) 27:570–5. doi:10.1073/pnas.27.12.570PubMed Abstract | CrossRef Full Text | Google Scholar
45. Clements RR. An inviscid model of two-dimensional vortex shedding. J Fluid Mech (1973) 57:321–36. doi:10.1017/S0022112073001187CrossRef Full Text | Google Scholar
47. Knowles K, Wilkins P, Ansari S, Zbikowski R. Integrated computational and experimental studies of flapping-wing micro air vehicle aerodynamics. In: Proceedings of the 3rd international symposium on integrating CFD and experiments in aerodynamics. CO, United States: U.S. Air Force Academy (2007). p. 1–15.
Glossary
Keywords: starting flat plate, discrete vortex, potential flow, unsteady aerodynamics, vortex merge, LEV, TEV
Citation: Xia X and Shangguan L (2025) Reduced-order aerodynamic model of a starting plate with discrete-vortex merging. Front. Phys. 13:1632903. doi: 10.3389/fphy.2025.1632903
Received: 21 May 2025; Accepted: 15 August 2025;
Published: 16 September 2025.
Edited by:
Andrea Scagliarini, National Research Council (CNR), ItalyReviewed by:
Cetin Canpolat, Çukurova University, TürkiyeAnkang Gao, University of Science and Technology of China, China
Copyright © 2025 Xia and Shangguan. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Xi Xia, eGlheGlzc0BzanR1LmVkdS5jbg==