 Irina Perepelitsa
Irina Perepelitsa Annalisa Quaini
Annalisa Quaini- Department of Mathematics, University of Houston, Houston, TX, United States
We are interested in modeling and simulating the dynamics of human crowds, where the spreading of an emotion (specifically fear) influences the pedestrians’ behavior. Our focus is on crowd dynamics in venues where dense aggregations might occur within a rarefied crowd (e.g., an airport terminal) and emotional states evolve in space and time as the result of a threat (e.g., a gunshot). In the parts of the venue where crowd density is low, we consider a microscopic, individual-based model inspired by Newtonian mechanics. In this model, the fear level of each pedestrian influences their walking speed and is affected by the fear levels of the people in their vicinity. The mesoscopic model is derived from the microscopic model via a mean-field limit approach. This ensures that the two types of models are based on the same principles and analogous parameters. The mesoscopic model is adopted in the parts of the venue where crowd density is higher, i.e., we use the crowd density as a regime indicator. We propose interface conditions to be imposed at the boundary between the regions of the domain where microscopic and mesoscopic models are used. We note that we do not consider dangerously high-density crowd scenarios, for which a macroscopic (continuum) model would be more appropriate. We test our microscopic-to-mesoscopic model on problems involving a crowd walking through a corridor or evacuating from a square.
1 Introduction
Crowds have the ability to act, think, and adapt their own movement strategies in response to environmental cues. This feature, possessed by living systems in general, sets them apart from inert matter, which follows deterministic laws of physics and behaves predictably under given conditions. It also makes the mathematical modeling of crowd dynamics particularly challenging. In fact, to be accurate even in situations when people alter their typical walking strategy in response to an external cue (e.g., a gunshot or a propagating fire), a model of crowd dynamics needs to go beyond the principles of classical mechanics. Specifically, it needs to incorporate mechanisms to account for heterogeneous behavior of individual entities and their interactions, together with the effect of an emotional state (e.g., fear) on both individuals and interactions. See, e.g., [1–7]. Such a model could be instrumental in improving crowd management in venues like airport terminals or concert arenas.
Microscopic, such as agent-based models, effectively capture individual variability since they allow each agent to adopt a unique walking strategy. See, e.g., [8–12]. For a comprehensive overview of agent-based models that implement emotional contagion in crowd simulations, we refer the reader to [13]. Unfortunately, microscopic models struggle with scalability. Specifically, they cannot accurately represent complex, non-local, and nonlinearly additive interactions as crowd size increases. Mesoscopic or kinetic models (see, e.g. [5–7, 14–18]) offer an alternative that can reproduce complex interactions in crowds. Inspired by the kinetic theory of gases, these models consider individuals as active particles, instead of passive particles, i.e., particles that interact in a conservative and reversible manner as in traditional gas dynamics. The consequence is that interactions in kinetic models for crowd dynamics are irreversible, non-conservative and, in some cases, nonlocal and nonlinearly additive [6, 7, 15]. Therefore, kinetic models offer a powerful tool to overcome the limitations of agent-based models in capturing complex interactions. However, these models, which are Boltzmann-type evolution equations for the statistical distribution of pedestrian positions and velocities, become computationally expensive when the size of the computational domain is large.
This paper proposes a hybrid approach to the study of crowds under the influence of a spreading emotion aiming to combine the advantages of microscopic and kinetic models, while lessening the respective limitations. The starting point for our hybrid model is a microscopic model from [19] in which the emotional state (i.e., the fear level) of each person influences their walking speed and is affected by the emotional state of the people in their vicinity. Note that the emotional state is introduced as a variable that, in response to interactions with other people, can change in space and time and, in turn, alter the walking strategy, as it happens in real-life situations [4]. Through a mean-field limit approach, from the microscopic model we derived a (Bhatnagar–Gross–Krook-like) kinetic model. This operation in 1D is presented in [19], while here we extend it to 2D and propose how the kinetic and microscopic models can be interfaced, so that each model can be used where its use is most appropriate. Specifically, the microscopic model is adopted in the parts of the domain where the crowd density is lower than a prescribed value since in this case such model is computationally cheap and accurate. Where the density is above the prescribed value and the microscopic model loses accuracy and computational efficiency, we adopt the kinetic model. Since we limit the size of the domain where the kinetic model holds, our hybrid microscopic-to-mesoscopic approach remains computationally efficient. Figure 1 shows a picture of a real crowd with mixed density: the vertical black line separates the higher density crowd (left), which would be simulated with the kinetic model, from the lower density crowd (right), which would be simulated with the microscopic model.

Figure 1. Example of a mixed density crowd, with dense aggregations (left of the black line) near low-density regions (right of the black line).
In addition to the advantages discussed so far, our hybrid model stems from a multiscale vision, i.e., the dynamics at the microscopic scale define the conceptual basis toward the derivation of the models at a higher scale (mesoscopic). The reader interested in the further derivation of a macroscopic model from the kinetic model is referred to [19], where results are limited to one space dimension. At the macroscopic level, the crowd is seen as a continuum and thus macroscopic models are suited for densely packed crowds. It is shown in [19] that the kinetic description provides better resolution than the macroscopic model whose viscosity solution becomes incorrect when the characteristics at the particle level cross. Because of this, we do not consider the macroscopic model and how it interfaces to the models at the lower scales.
Following [19], for simplicity we assume that the walking direction is prescribed. This means that our model cannot reproduce the tendency of an individual in a stressful situation to follow the stream of people, also referred to as herding in the literature [20]. The reader interested in kinetic models that allow for a change in walking direction as a results of interactions with other people and the environment (i.e., walls and other kinds of obstacle) is referred to [16–18, 21–25]. We remark that only in [23] the emotional state is treated as a variable, while it is parameterized as a constant in space and time in [16, 18, 21, 22, 25] and as a function of space and time in [17, 24].
We assess our hybrid method through test cases in one and two dimensions. The tests in 1D represent one-directional motion through a corridor, where half of the people have a high fear level and the remaining half have no fear at all. This situation leads to a localized high crowd density as the panicked people walk faster than the non-panicked. The 2D tests also create a localized high-density region, resulting from a scenario similar to a group of panicked people trying to evacuate a square.
The rest of the paper is organized as follows. Section 2 briefly recalls the derivation of the 1D mesoscopic model from the 1D microscopic model from [19], extends the derivation to 2D and then presents the discretization of the 2D microscopic and mesoscopic models. The interface conditions that allow to use microscopic and mesoscopic models in different parts of a given domain are discussed in Section 3. Section 4 presents the numerical results and conclusions are drawn in Section 5.
2 From microscopic to mesoscopic
2.1 In one dimension
We consider a system of
for
see for example, [19]. Parameter
We note that Equation 1 is simply Newton’s law, assuming that fear is the only driver for motion. In this simple model, every agent has the same mass, which then gets normalized to 1.
The kinetic formulation is derived from Equations 1, 2 via a mean-field limit approach. For this, we denote the empirical distribution density as:
where
By manipulating the above equation as explained in [19], one gets the following integral equation:
where
and
Since
which can be rewritten as:
where the local average fear level
Under appropriate compactness assumptions, the empirical distribution
2.2 In two dimensions
The
for
For the derivation of the kinetic model, we follow the same steps used in 1D. We denote the empirical distribution density as:
where
Since
By plugging Equation 6 into the above equation, we obtain:
Using Equation 7, we get
We have:
where
Similarly, we have:
where
Using Equations 9, 10, the second term at the right-hand side of Equation 8 can be written as:
Thus, Equation 8 becomes
Integrating the terms on the right-hand side of this equation by parts, assuming that
Since
which can be rewritten as:
where the local average fear level
Under appropriate compactness assumptions, the empirical distribution
2.3 Discretization of the 2D models
We use the explicit Euler scheme for the system of ordinary differential Equation 8. Let
with
Next, we consider the discretization of Equation 11 in space, time, and fear level using a finite difference method. We assume that
where the centers of the cells
where the centers of the cells
Let
to satisfy the Courant–Friedrichs–Lewy (CFL) condition (see, e.g. [26]). Further, we denote
The finite difference method produces an approximation of the average over the cell
To write the finite difference discretization of Equation 11, we introduce
Additionally, let
and the minmod slope limiter
See, e.g., [26] for more details.
A finite difference scheme for Equation 11 is as follows: At time step
where the flux in
with
and the flux in
with
The flux and flux limiter in
with
The subscript
Scheme Equation 14 is second-order in the fear level variable
Finally, we remark that by setting to 0 all terms in
3 Hybrid microscopic-to-mesoscopic approach
The main idea of the hybrid scheme is to use different models depending on the local crowd density. In regions of the domain where the density is lower than a critical threshold
3.1 In one dimension
For simplicity of description, we assume that the kinetic domain, i.e., the part of the computational domain where the kinetic model holds, is an interval
In order to conserve the total “mass” of people, i.e., total number of people in the system when both probabilistic and deterministic models are used, we introduce a generalized microscopic model in which agents can have different, and in general, non-integer masses. To describe how it works, let
where
When agents cross an interface and pass from the microscopic domain to the kinetic domain, we have an inflow of mass into the kinetic domain. We handle this as follows: if agent
where
Note that in this case we choose a simpler approximation for the Dirac delta to have a more direct control on the support. The updated
Next, we consider crossing the interface in the opposite direction, i.e., from the kinetic domain to the microscopic domain. Suppose
Since at time
Then, index
To avoid loss or creation of mass (i.e., people), if Equation 19 is smaller than 1, a new agent is not created and the position of the interface is not changed. However, over a certain number of time steps the mass leaving the kinetic domain for the microscopic domain will amount to 1 or more. We note that in our simplified model, all pedestrians have non-negative fear levels and move with the assigned walking direction, which is aligned with the positive
Note that, since
and the total number of agents leaving the kinetic domain equals
So, when this mass is greater than 1, we create a new agent
In conclusion, at time
where
3.2 In two dimensions
For simplicity of description, we assume that the kinetic domain, i.e., the part of the computational domain where the kinetic model holds, is a rectangle
where
where
We use
Then, the kinetic domain at time
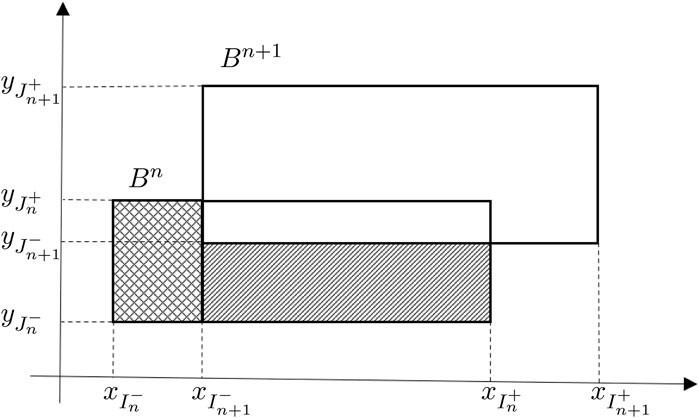
Figure 2. Kinetic domains
When an agent
where
Next, we consider crossing the interface in the opposite direction, i.e., from the kinetic domain to the microscopic domain. Suppose that
This is the union of the shaded rectangles in Figure 2.
We explain the procedure we follow for
Hence, we create a new agent
Index
Let us consider interface
When this mass is greater than or equal 1, we create a new agent
and
In conclusion, at time
For the cells that belong to the kinetic domain
4 Numerical results
We assess our hybrid method through test cases in one dimension, presented in Section 4.1, and two dimensions, reported in Section 4.2.
4.1 Tests in one dimension
We consider
The agent based dynamics is obtained via the 1D counterpart of Equation 12 with
and the average fear level
with
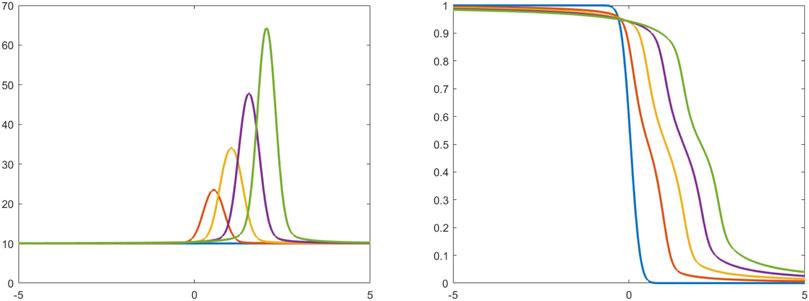
Figure 3. The density of agents (left) and the average fear level (right) from the microscopic model at times
Next, we apply the hybrid microscopic-kinetic methods from Section 3.1, with critical density
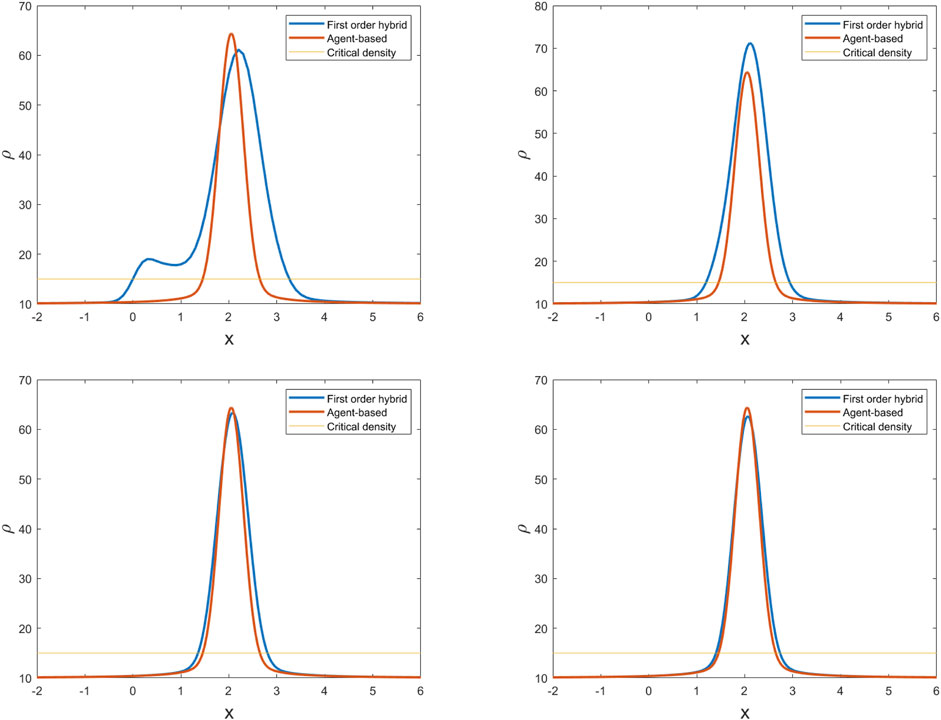
Figure 4. Crowd density given by the microscopic model and the first order hybrid method with meshes
Now, let us consider the same meshes and time steps as above, with the second-order scheme. Figures 5, 6 show the crowd density when the van Leer limiter and the minmod limiter are applied, respectively, and the comparison with the crowd density given by the microscopic model. Again, we see great agreement as the mesh is refined.
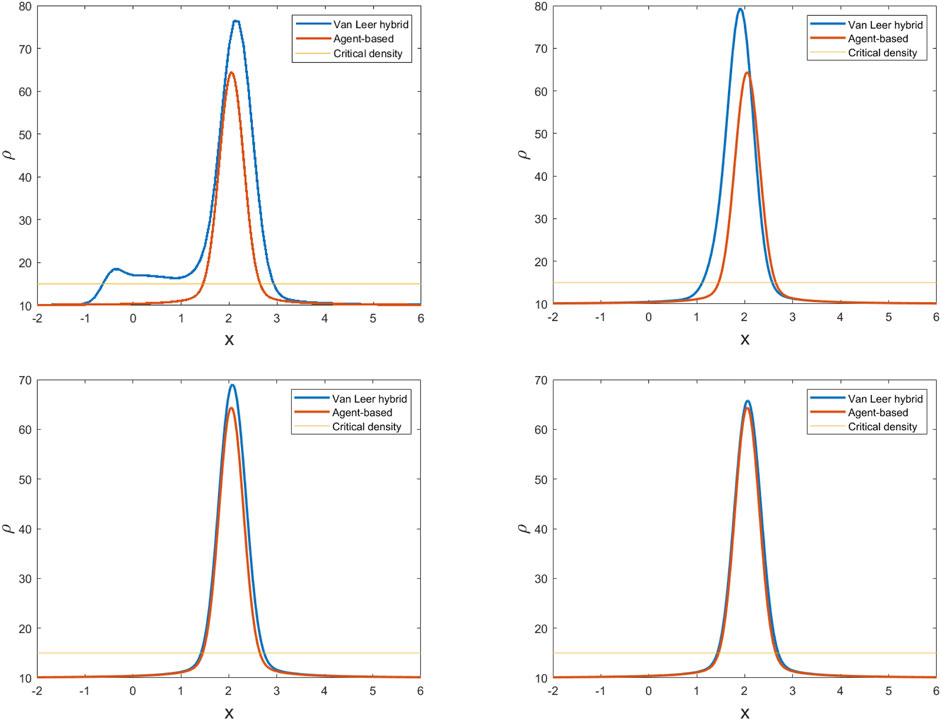
Figure 5. Crowd density given by the microscopic model and the hybrid method with the van Leer limiter and meshes
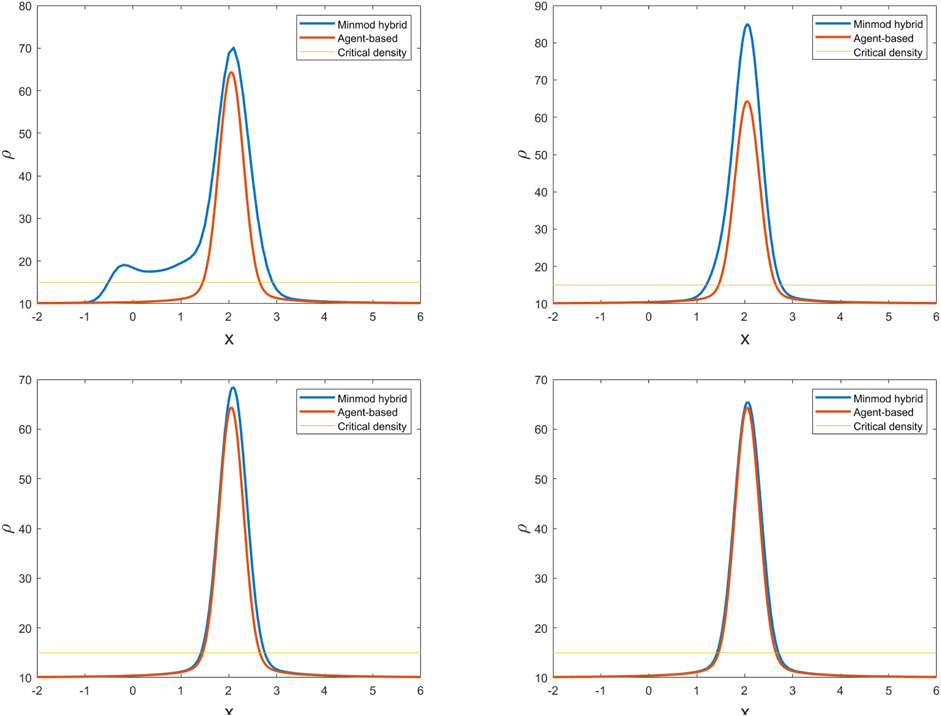
Figure 6. Crowd density given by the microscopic model and the hybrid method with the minmod limiter and meshes
To quantify the comparisons in Figures 4–6 and Tables 1, 2 report the corresponding differences in
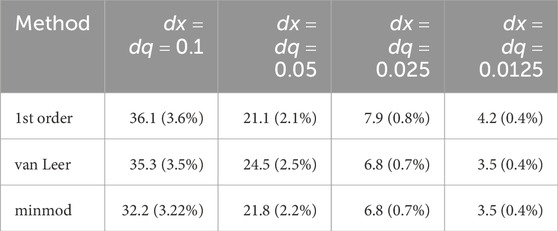
Table 1. Difference between the solution given by the microscopic model and the solution given by the hybrid approaches in
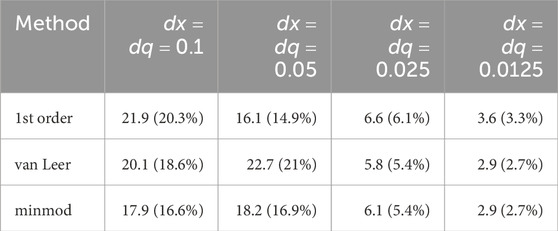
Table 2. Difference between the solution given by the microscopic model and the solution given by the hybrid approaches in
Finally, we present some results that show the importance of model parameter
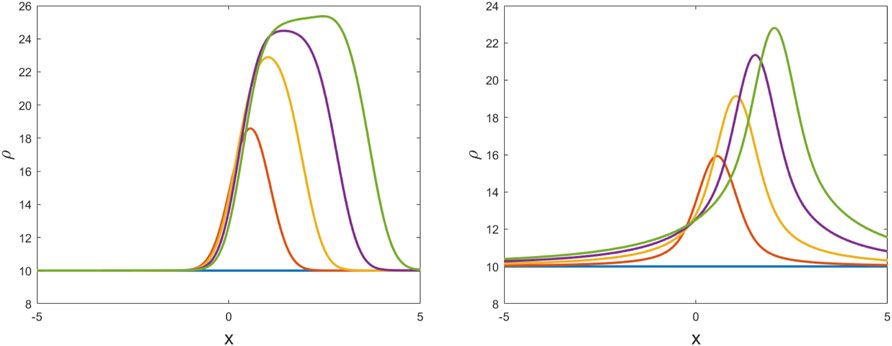
Figure 7. Crowd density given by the hybrid method for
While constant
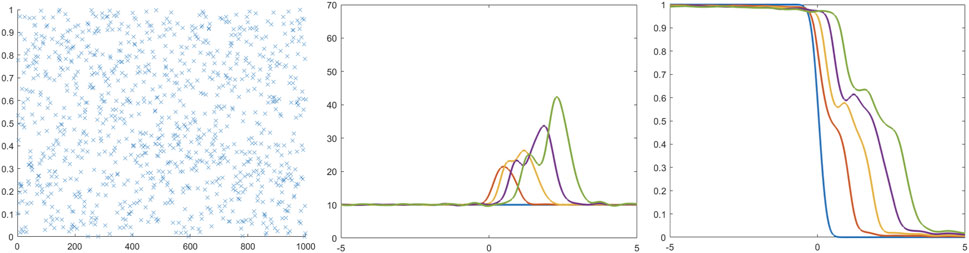
Figure 8. Scatter plot showing the random gamma values for each of 1,000 agents (left), along with corresponding agent density (center) and average fear level (right) given by the microscopic model at times
4.2 Tests in two dimensions
We consider
The agent based dynamics is obtained by using Equation 12 with
and the average fear level
at
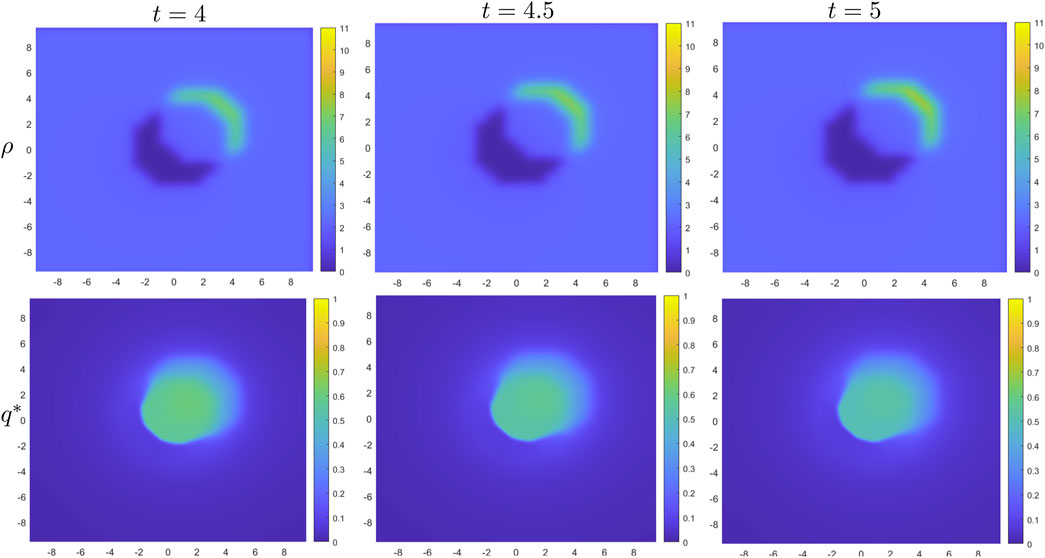
Figure 9. The density of agents (top row) and average fear level (bottom row) given by the microscopic model at times
Next, we apply the hybrid microscopic-kinetic methods from Section 3.2, with critical density
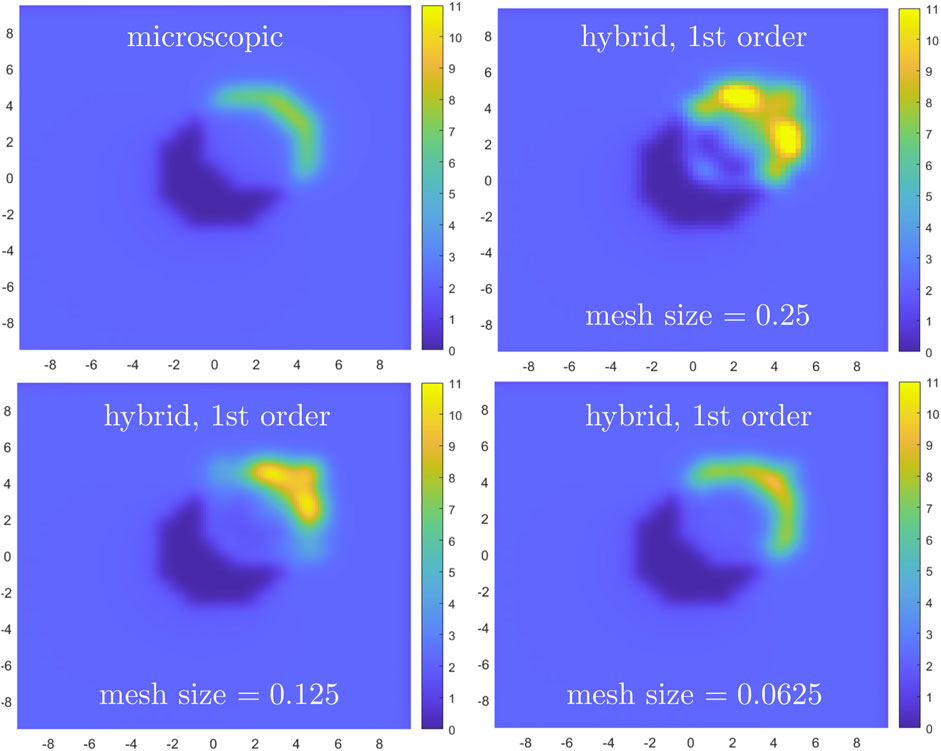
Figure 10. Crowd density given by the microscopic model (top, left) and first order hybrid method with meshes
We repeat the comparison using a second-order schemes, with the same meshes and time step as above. Figures 11, 12 report the microscopic vs. hybrid comparison in terms of crowd density when the van Leer limiter and the minmod limiter are applied, respectively. Again, we see that the agreement improves as the computational mesh is refined.
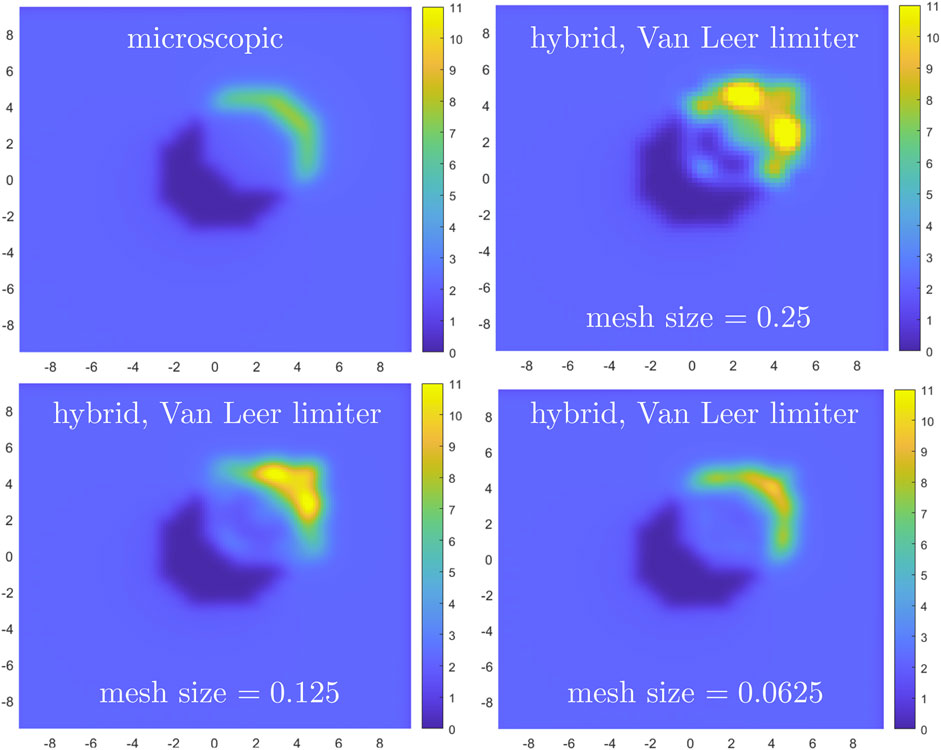
Figure 11. Crowd density given by the microscopic model (top, left) and the hybrid method with the Van Leer limiter scheme for meshes
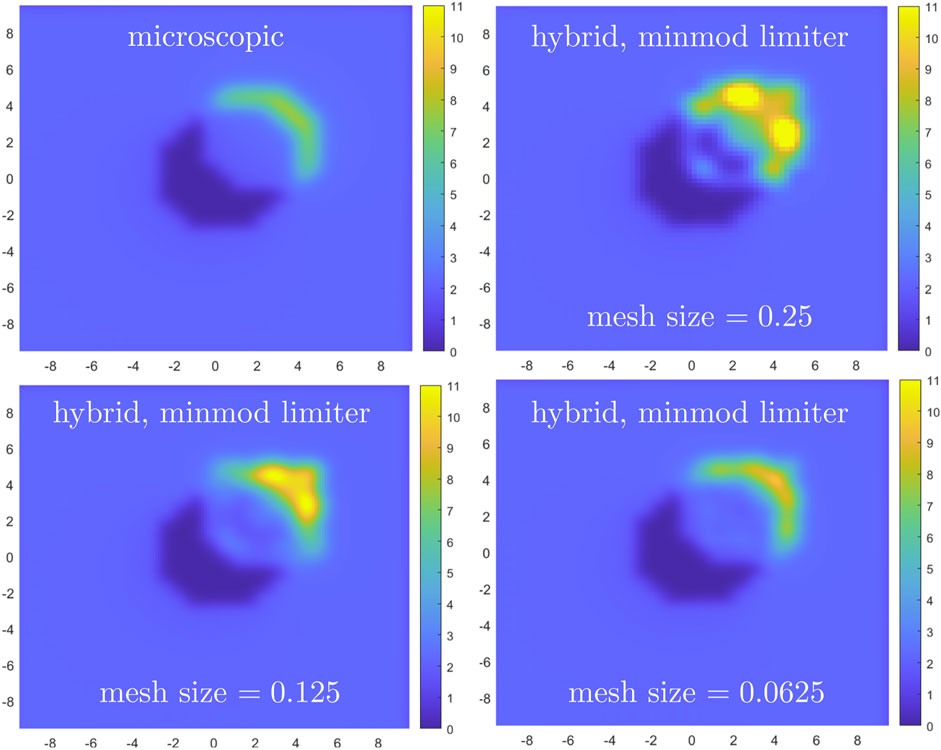
Figure 12. Crowd density given by the microscopic model (top, left) and the hybrid method with the minmod limiter scheme for meshes
To quantify the level of agreement shown in Figures 10–12, we report in Tables 3, 4 the difference in absolute value between the solution given by the microscopic model and the solution given by the hybrid approach in the
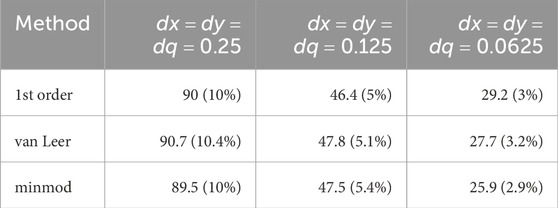
Table 3. Difference in absolute value between the solution given by the microscopic model and the solution given by the hybrid approaches in the
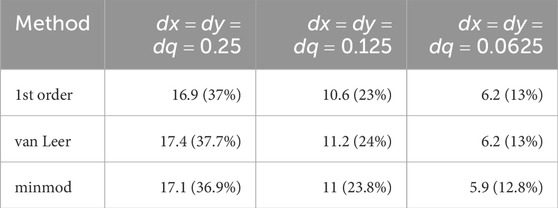
Table 4. Difference in absolute value between the solution given by the microscopic model and the solution given by the hybrid approaches in the
We conclude by considering the more realistic case where the value of the interaction strength varies from one agent to the other. Like for the corresponding 1D test, we assign a random value of
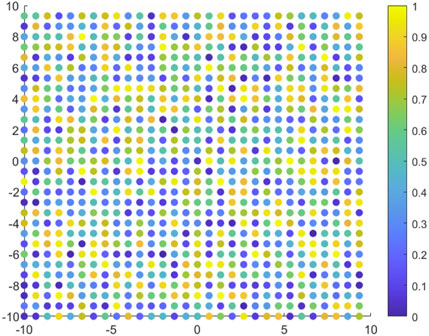
Figure 13. Random values of
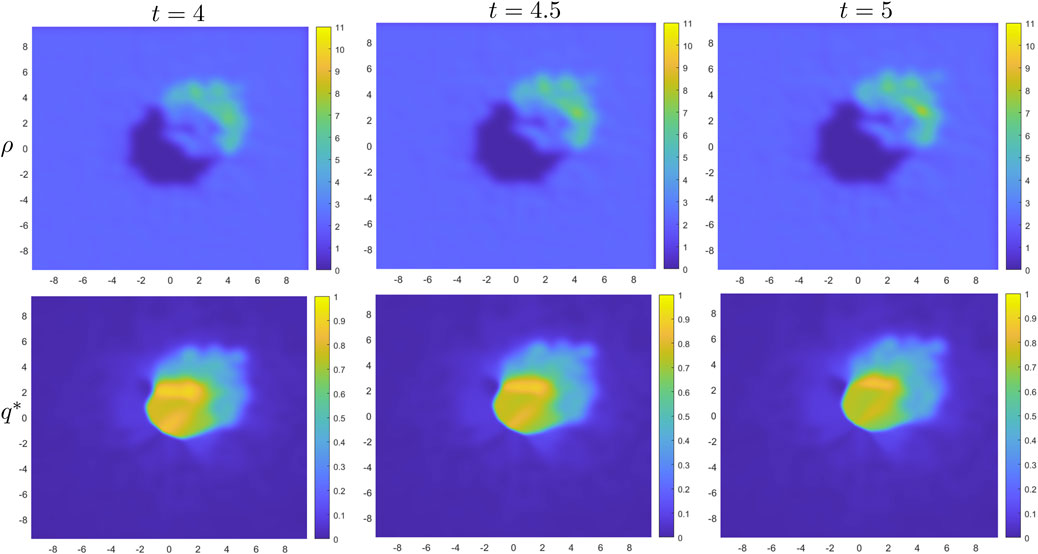
Figure 14. Crowd density (top row) and average fear level (bottom row) given by the microscopic model with the values of
5 Conclusions and future perspectives
We developed and numerically analyzed a hybrid modeling approach for simulating crowd dynamics under the influence of propagating fear in walking venues with mixed crowd densities. The hybrid nature is related to the fact that our approach uses a microscopic (agent-based) model in low-density regions, while in higher-density areas it adopts a mesoscopic (kinetic) model, derived from the microscopic model via a mean-field limit approach. The microscopic model captures individual variability and local interactions, while the mesoscopic model efficiently handles collective behaviors in denser crowds. By coupling the two models with appropriate interface conditions, we take advantages of their strengths while mitigating their respective limitations. We ensured consistency between the two models through a mean-field limit and proposed interface conditions to enable seamless coupling of regions of varying density.
We performed tests in one and two dimensional spatial domains. We showed that our hybrid approach produces results in agreement with those provided by the microscopic model when the crowd is sufficiently dense and the computational mesh is fine enough. This validates the effectiveness of our hybrid strategy in accurately capturing crowd dynamics across varying density regimes. Additionally, our tests demonstrate the sensitivity of the computed crowd density and average fear level on model parameter
In order to focus on the behavioral features of crowd dynamics, we have introduced a strong simplification in this work: the walking direction is prescribed. This choice represents the main limitation of the hybrid model presented in this paper. In reality, each individual in a crowd has their own purposes and abilities, which lead to the selection of a walking strategy, i.e., a trajectory to follow in order to reach the desired target(s) and a speed to move along such trajectory. The walking strategy is influenced by the emotional state (considered in this paper) and the interactions with other people in the crowd and the environment, which includes walls, exits, and obstacles (not considered in this paper). A relatively easy way to account for such interactions is with tools of game theory, as we have done in [18, 23]. However, the resulting more realistic model presents difficulties at the numerical level related to need to contain high computational costs. One possible way to meet this need is through splitting algorithms, which break the model into a set of subproblems that are easier to solve and for which practical algorithms are readily available. The inclusion of interactions with people and the environment and the development of suitable splitting algorithms will be object of future work.
Data availability statement
The raw data supporting the conclusions of this article will be made available by the authors upon request, without undue reservation.
Author contributions
IP: Validation, Writing – original draft, Visualization, Methodology, Formal Analysis, Investigation, Software, Writing – review and editing. AQ: Conceptualization, Investigation, Methodology, Supervision, Writing – review and editing, Writing – original draft.
Funding
The author(s) declare that no financial support was received for the research and/or publication of this article.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Generative AI statement
The author(s) declare that no Generative AI was used in the creation of this manuscript.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
1. Helbing D, Johansson A, Al-Abideen HZ. Dynamics of crowd disasters: an empirical study. Phys Rev E (2007) 75:046109. doi:10.1103/PhysRevE.75.046109
2. Helbing D, Johansson A. Pedestrian, crowd, and evacuation dynamics. New York, NY: Springer New York (2009). p. 1–28. doi:10.1007/978-3-642-27737-5_382-5
3. Wijermans N, Conrado C, van Steen M, Martella C, Li J. A landscape of crowd-management support: an integrative approach. Saf Sci (2016) 86:142–64. doi:10.1016/j.ssci.2016.02.027
4. Haghani M, Sarvi M. Social dynamics in emergency evacuations: disentangling crowd’s attraction and repulsion effects. Physica A: Stat Mech its Appl (2017) 475:24–34. doi:10.1016/j.physa.2017.02.010
5. Aylaj B, Bellomo N, Gibelli L, Reali A. A unified multiscale vision of behavioral crowds. Math Models Methods Appl Sci (2020) 30(1):1–22. doi:10.1142/s0218202520500013
6. Bellomo N, Gibelli L, Quaini A, Reali A. Towards a mathematical theory of behavioral human crowds. Math Models Methods Appl Sci (2022) 32(02):321–58. doi:10.1142/s0218202522500087
7. Bellomo N, Liao J, Quaini A, Russo L, Siettos C. Human behavioral crowds review, critical analysis and research perspectives. Math Models Methods Appl Sci (2023) 33(08):1611–59. doi:10.1142/s0218202523500379
8. Helbing D, Farkas I, Vicsek T. Simulating dynamical features of escape panic. Natures (2000) 407:487–90. doi:10.1038/35035023
9. Wang J, Zhang L, Shi Q, Yang P, Hu X. Modeling and simulating for congestion pedestrian evacuation with panic. Physica A: Stat Mech its Appl (2015) 428:396–409. doi:10.1016/j.physa.2015.01.057
10. Zou Y, Xie J, Wang B. Evacuation of pedestrians with two motion modes for panic system. PLoS One (2016) 11(4):e0153388. doi:10.1371/journal.pone.0153388
11. Rahmati Y, Talebpour A. Learning-based game theoretical framework for modeling pedestrian motion. Phys Rev E (2018) 98:032312. doi:10.1103/PhysRevE.98.032312
12. Xu M, Xie X, Lv P, Niu J, Wang H, Li C, et al. Crowd behavior simulation with emotional contagion in unexpected multihazard situations. IEEE Trans Syst Man, Cybernetics: Syst (2021) 51(3):1–15. doi:10.1109/TSMC.2019.2899047
13. van Haeringen E, Gerritsen C, Hindriks K. Emotion contagion in agent-based simulations of crowds: a systematic review. Auton Agent Multi-agent Syst (2023) 37:6. doi:10.1007/s10458-022-09589-z
14. Bellomo N, Bellouquid A. On multiscale models of pedestrian crowds from mesoscopic to macroscopic. Commun Math Sci (2015) 13:1649–64. doi:10.4310/cms.2015.v13.n7.a1
15. Bellomo N, Bellouquid A, Gibelli L, Outada N. A quest towards a mathematical theory of living systems. In: Modeling and simulation in science, engineering and technology. Birkhäuser (2017). doi:10.1007/978-3-319-57436-3
16. Bellomo N, Gibelli L. Toward a mathematical theory of behavioral-social dynamics for pedestrian crowds. Math Models Methods Appl Sci (2015) 25(13):2417–37. doi:10.1142/S0218202515400138
17. Bellomo N, Gibelli L, Outada N. On the interplay between behavioral dynamics and social interactions in human crowds. Kinetic Relat Models (2019) 12(2):397–409. doi:10.3934/krm.2019017
18. Kim D, Quaini A. A kinetic theory approach to model pedestrian dynamics in bounded domains with obstacles. Kinetic Relat Models (2019) 12(6):1273–96. doi:10.3934/krm.2019049
19. Wang L, Short MB, Bertozzi AL. Efficient numerical methods for multiscale crowd dynamics with emotional contagion. Math Models Methods Appl Sci (2017) 27(1):205–30. doi:10.1142/S0218202517400073
20. Llorca D, Haghani M, Cristiani E, Bode N, Boltes M, Corbetta A. Panic, irrationality, and herding: three ambiguous terms in crowd dynamics research. J Adv Transportation (2019) 2019:1–58. doi:10.1155/2019/9267643
21. Bellomo N, Bellouquid A, Knopoff D. From the microscale to collective crowd dynamics. SIAM Multiscale Model and Simulation (2013) 11(3):943–63. doi:10.1137/130904569
22. Agnelli JP, Colasuonno F, Knopoff D. A kinetic theory approach to the dynamics of crowd evacuation from bounded domains. Math Models Methods Appl Sci (2015) 25(01):109–29. doi:10.1142/S0218202515500049
23. Kim D, O’Connell K, Ott W, Quaini A. A kinetic theory approach for 2D crowd dynamics with emotional contagion. Math Models Methods Appl Sci (2021) 31(06):1137–62. doi:10.1142/S0218202521400030
24. Kim D, Labate D, Mily K, Quaini A. Data-driven learning to enhance a kinetic model of distressed crowd dynamics. Math Models Methods Appl Sci (2025) 35(07):1609–36. doi:10.1142/S021820252540007X
25. Bakhdil N, El Mousaoui A, Hakim A. A kinetic BGK model for pedestrian dynamics accounting for anxiety conditions. Symmetry (2025) 17(1):19. doi:10.3390/sym17010019
Keywords: crowd dynamics, fear propagation, kinetic model, microscopic model, multiscale model, complex systems
Citation: Perepelitsa I and Quaini A (2025) Coupling microscopic and mesoscopic models for crowd dynamics with emotional contagion. Front. Phys. 13:1644470. doi: 10.3389/fphy.2025.1644470
Received: 10 June 2025; Accepted: 14 July 2025;
Published: 20 August 2025.
Edited by:
Ryosuke Yano, Tokio Marine dR Co., Ltd., JapanReviewed by:
Nouamane Bakhdil, Cadi Ayyad University, MoroccoNisrine Outada, Cadi Ayyad University, Morocco
Copyright © 2025 Perepelitsa and Quaini. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Annalisa Quaini, YXF1YWluaUBjZW50cmFsLnVoLmVkdQ==