 Brendan Toupin
Brendan Toupin- DIRECTV LLC, El Segundo, CA, United States
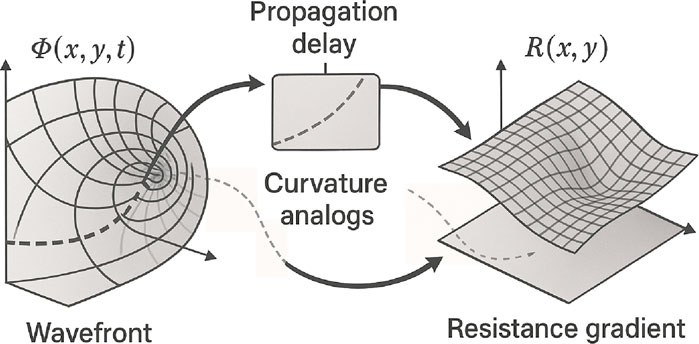
Introduction: We study whether gravity-like kinematics (bending, time-delay, redshift-like shifts, capture/orbits) can arise as media analogs from a deterministic scalar-field propagation model without invoking mass or spacetime curvature.
Methods: We evolve a real scalar field under a spatially varying symmetric positive-definite transport tensor R(x) and non-negative damping field Λ(x); with source off (S≡0). Thirteen simulations quantify deflection, transit delay with escape thresholds, collapse/trapping and orbital containment, anisotropy-induced drift, repulsion under curvature inversion, and interference. We monitor energy budgets (Rayleigh loss + boundary flux) and check spectral safety and robustness.
Results: Observables are reproducible on 256 × 256 grids with 512 × 512 confirmations for key cases. Bending scales with ∥∇R∥ and flips sign under gradient reversal; transit delay increases monotonically with ∫Λdx and can prevent exit; bounded orbits satisfy a/p≤1.15 over a finite capture band; radial drift in 1/r2 profiles follows |r ̇|∝r^(-α) with a≈2; transverse drift sign matches sign(Rxy); interference visibility follows a cosine in relative phase.
Discussion: Results constitute operational gravitational analogs—transport and loss in structured media—rather than statements about spacetime curvature. We release code/configs/outputs for full reproducibility and outline laboratory test paths.
1 Introduction
Gravitational phenomena—trajectory bending, path-dependent time-delay, redshift-like frequency shifts, capture, and rebound—are traditionally explained via spacetime curvature and mass [1–3]. Here we ask a narrower, operational question: to what extent can the kinematics of such effects be reproduced as gravitational analogs by a deterministic scalar-field propagation model moving through a structured medium?
1.1 Model ingredients at a glance
We evolve a real scalar field
so spatial variation in
1.2 Operational use of “analog”
We call an outcome a gravitational analog when the model reproduces the dimensionless kinematic observables of a target phenomenon (e.g., deflection angle, path-delay ratio, frequency-ratio shift) within stated tolerances—without asserting equivalence to Einstein’s equations or invoking spacetime curvature. For context, our benchmark observables refer to classic tests such as solar-limb deflection, radar-echo delay, and gravitational redshift [13–15].
1.3 Scope (what this paper is—and is not)
This study investigates kinematic analogs in a linear scalar-transport model. It does not solve Einstein’s field equations, include back-reaction of energy on geometry, or model gravitomagnetic effects arising from spacetime curvature. Conservation statements apply in uniform-
1.4 Inverse design
While this work solves the forward problem (given
1.5 Relation to prior work
Methodologically, our approach is adjacent to analogue gravity in acoustics and optics—where structured media reproduce aspects of gravitational kinematics [4–9]—yet remains distinct from numerical relativity, which directly solves Einstein’s equations under gauge and constraint handling [10–12]. We use this literature to situate scope, not to claim equivalence.
1.6 Contributions
1. Unified formulation and mathematical spine. We make explicit the governing evolution law, the associated energy functional and decay law, stability/Courant bounds under symmetric positive-definite
2. Thirteen simulations under one rule. We demonstrate bending (geodesic analog), Shapiro-like delay, redshift-like shifts, inverse-square-like radial drift, collapse-like trapping, rebound, interference, and related variants—each tied to a specific structure in
3. Predictions and falsification. We define testable, dimensionless observables (deflection
4. Reproducibility and robustness. We release code, configurations, and figure-regeneration scripts via public DOIs (Data and Code Availability). Robustness studies—larger grids, alternate sources and boundary conditions.
1.7 Paper organization
Section 2 surveys related work. Section 3 overviews the modeling ingredients and maps phenomena to transport/damping structures. Section 4 presents the governing equation, energy law, stability bounds, and boundary conditions. Section 5 reports thirteen simulations with standardized, dimensionless metrics. Section 6 gives benchmarks and falsification tests. Section 7 discusses scope and limitations. All data and code are archived on Zenodo; DOIs are listed in the Data Availability statement. Robustness checks and additional figures are provided in the Supplement.
2 Related work
Before presenting our model, we situate it among classical general relativity, analogue-gravity programs, and numerical relativity. Classical GR attributes gravitational phenomena to spacetime curvature sourced by stress–energy [1–3]; analogue gravity shows that structured media can reproduce many kinematic signatures (e.g., bending, delay) [4–9, 16–18]; numerical relativity solves Einstein’s equations directly in strong-field regimes [10–12]. Our contribution is a single-law, scalar-transport formulation that yields acceleration-like kinematics as analogs—curved trajectories and path-dependent delays—through spatially varying transport and damping fields, without solving Einstein’s equations. We quantify outcomes using dimensionless observables (deflection angle, delay ratio, frequency ratio) and state falsifiers, developed in Sections 5, 6.
2.1 General relativity and classic tests
General relativity (GR) explains gravitational phenomena as spacetime curvature sourced by stress–energy, with predictions verified from weak-to strong-field regimes [1–3, 20, 40]. The benchmark observables we reference—solar-limb light deflection, radar-echo time-delay, and gravitational redshift—are canonical GR tests [12–15, 49]. Our aim here is operational: reproduce these dimensionless kinematic observables as gravitational analogs using a linear scalar-transport model, without solving Einstein’s equations.
2.2 Analogue gravity: acoustics and optics
Analogue-gravity programs show how structured media can mimic geodesic-like transport. In acoustics, effective-metric ideas (Unruh; Visser) emulate horizons and geodesic behavior in flowing or inhomogeneous media [4, 5], with broad reviews by Barceló, Liberati and Visser [6, 7]. In optics, transformation-optics frameworks (Leonhardt; Pendry–Schurig–Smith) use spatially varying constitutive parameters to bend rays and shape phase fronts in ways formally analogous to geodesic transport [7, 15, 39]. Laboratory demonstrations include fiber-optic analogue horizons and related effects [8, 26]. Closely related graded-index (GRIN) constructs (e.g., the Luneburg lens; standard treatments in Born and Wolf) realize achromatic bending via smooth index profiles [16, 17, 27, 48].
Terminology crosswalk (reader note). Transformation-optics “effective metrics” and GRIN “index profiles” play roles analogous to our transport (resistance) tensor
2.3 Numerical relativity (contrast in scope)
Numerical relativity (NR) integrates Einstein’s equations with gauge/constraint handling to model strong-field spacetimes (e.g., binary black holes) [9–12]. By contrast, we evolve a single real scalar under spatially varying
2.4 Boundary treatments and stability in wave simulations
Open-domain wave simulations rely on artificial boundary treatments. Classical absorbing layers and non-reflecting boundary conditions appear across acoustics, seismics, and electromagnetics (e.g., Cerjan et al.; Berenger’s PML) [18, 19, 34–36]. We use a tapered-damping (“sponge”) layer—implemented by smoothly increasing
2.5 Relation to general relativity (scope boundary)
We study operational analogs of gravity-like kinematics in structured media, not solutions of Einstein’s equations. Our evolution law is a damped, anisotropic wave transport model on a fixed Euclidean lattice; it does not include curvature, geodesics, or mass-energy back-reaction. GR is used as a yardstick for kinematic motifs (bending, time delay, precession), not as the theory being solved [21–25, 30–33, 43–46, 49].
2.6 Relation to analogue gravity
Our scope aligns with analogue gravity: reproducing curved-spacetime-like kinematics in non-gravitational media to probe mechanisms and guide experiments. Classic results (e.g., acoustic horizons) motivate the approach of designing media parameters to elicit GR-reminiscent observables without asserting spacetime curvature [4, 6, 7, 48].
2.7 Relation to numerical relativity
This is not numerical relativity: we do not evolve the Einstein field equations, solve constraints, or manage gauge/radiative boundaries. We evolve a single scalar field with prescribed
2.8 Predictive value and benchmarks
The framework yields design-forward mappings from media to observables:
• Bending (Section. 5.1): deflection vs. local gradients of
• Containment (Section 5.5): azimuthal drift
• Discriminants (analogs vs. generic wave effects). We tag a behavior as a gravity-like analog only when it (i) depends monotonically on a controlled feature of
2.9 Limitations and differences
• No curvature/no EEP or PPN tests: we do not test GR, PPN parameters, or the equivalence principle [46, 47].
• Media analogs only: any frame-drag-like effects in §5.7 are media phenomena, not GR gravitomagnetism [48].
• Dissipation by design:
• Forward design, not inverse GR: we design
2.10 Summary positioning and predicted observables
• Theory anchors: GR sets the gold standard for gravitational dynamics [1–3, 10–12].
• Method lineage: Analogue-gravity shows that structured media can reproduce many kinematic signatures without GR dynamics [4–9, 16–18].
• Our contribution: a single-law scalar-transport formulation that (i) makes those analogs explicit in terms of
3 Gravity-like behavior as emergent propagation in structured fields
Traditional theories attribute gravitational acceleration to mass—either via long-range forces (Newtonian mechanics) or spacetime curvature (general relativity) [6, 7, 48]. In both, mass–energy is the source term. Operationally, however, what is measured are kinematic outcomes—deflected paths, path-dependent time-delays, frequency shifts. This suggests a complementary question: can gravity-like kinematics arise as analogs from structured propagation alone, without solving Einstein’s equations [28, 29, 37]?
We explore this possibility with a constructive, deterministic model in which gravitational analogs emerge from scalar-field transport modulated by two spatial structures [38, 42]:
• A resistance field
• A damping field
The real scalar field
• Acceleration-like drift toward high-delay regions. Packets exhibit net drift toward zones that increase cumulative travel-time (via
• Curved trajectories (geodesic analogs) from
• Redshift-like frequency changes. Weak gradients in
• Escape thresholds from integrated delay. Sufficient cumulative delay (from
We quantify these outcomes by dimensionless observables—deflection angle
• Scope note. We seek kinematic analogs, not equivalence to curvature dynamics. The model does not include spacetime curvature, back-reaction of energy on geometry, or gravitomagnetic effects. Conservation statements apply in uniform-
This approach is simulatable, constructive, and testable. It models gravity-like behavior from first principles using only scalar transport with locally specified
4 Methods
This section makes the modeling contract explicit. We specify the field, domain, and notation; state the governing equation; derive the energy and decay law; interpret the tensor-divergence (anisotropy/steering); and give the discrete scheme, stability bound, and boundary/initial conditions. The goal is a paper-faithful, constructive recipe: every simulation in Section 5 can be regenerated from these ingredients without hidden parameters.
4.1 Transparency and materials
The full simulation engine, discretization details, update rule, and example YAMLs/outputs are archived (Section 9). Implementation specifics—including stencil choices, stepper policy, and figure scripts—are documented in Supplementary Appendix C and mirrored in the software record.
4.2 Fields and assumptions
We model a scalar
4.3 Notation and domain
We evolve a real scalar field
4.4 Boundary conditions
We use two BC families: (i) reflective (Neumann-type) for the core region in containment tests, and (ii) absorbing aprons (thin
4.5 Governing equation of motion
The field obeys a linear, second-order evolution law
with time-independent
[38]. Thus gradients and anisotropy of
4.6 Energy functional and decay law
Define the energy density
Multiplying (4.1) by
Consequences. In undamped, closed subdomains
4.6.1 Damping is not potential/curvature
4.6.2 Energy identity (summary
For time-independent
Multiplying the evolution law by
i.e., monotone decay from damping (
4.7 Tensor divergence and anisotropy (interpretation)
The operator expands component-wise as
so diagonal terms
4.8 Discretization and time stepping
4.8.1 Spatial discretization (conservative divergence form)
On a uniform Cartesian grid with spacings
with face-averaged coefficients
4.8.2 Time integration (damping-stable, second order)
Let
4.8.3 Stability (CFL) bound and coefficient conditions
Let
[34]. We enforce SPD bounds
4.9 Boundary and initial conditions
4.9.1 Reflective (Neumann, no-flux)
4.9.2 Absorbing sponge (tapered damping)
To emulate open boundaries we use a smoothly increasing
where
4.9.3 Periodic
Variables and fluxes wrap across opposing faces identically.
4.9.4 Initial data
We use localized pulses (Gaussian, Ricker), narrowband wave packets, and cavity modes as specified per figure. Each caption reports the source definition and parameters.
4.10 Dimensionless observables (measurement procedures)
We evaluate outcomes via dimensionless kinematic observables reported in captions and summarized in Section 5.
(a) Deflection angle
and
(b) Delay ratio
(c) Frequency ratio
Achromaticity. In the linear regime we use frequency-independent
4.11 Stability and δt policy (CFL)
With explicit second-order time stepping, stability follows a CFL-type bound determined by the discrete spatial operator for
where
with
and use an auto-CFL policy (safety factor
4.12 Reporting standards (reproducibility hygiene)
Every figure/caption states: grid
4.13 Provenance and versioning
All main-text figures were recomputed with an updated implementation (EOM-v1) of the governing Equation 4.1. On the original configurations from the reviewed submission, EOM-v1 reproduces the reported dimensionless observables—deflection angle
5 Simulation results: Gravitational behavior from structured fields
This section reports operational analogs of gravitational phenomena produced by a scalar field
Notation and dimensionality. We write
Code and data (reproducibility). All §5 configs (YAML), engine source, and outputs (.npz recorders with fields + metrics) are archived with commit hashes at < DOI/URL>. Each figure caption lists the config slug, grid(s),
Acceptance gates (applied to every §5. x).
1. Energy budget closure after transients (
2. The section’s primary metric meets its pre-registered threshold.
3. Robustness across grid size (
4. Spectral safety: content remains sub-Nyquist (anti-aliasing guard).Predictions and falsifiers. Each §5. x states a concrete prediction for its primary metric and a matching falsifier; global statements are summarized in §4.
Boundary conditions (policy). Absorbing sponges for open domains, reflective for containment basins, periodic for controls; flux tallies verify low reflection (see §4). Profiles with interfaces are
Grid sizes and robustness. Figures in §5 use 2562 grids unless labeled; 5122 repeats for free-fall (§5.1) and containment (§5.5) are reported in Supplementary Appendix D,E. Boundary variants (reflective core + absorbing apron) are included; additional pulse-shape sweeps are earmarked for follow-on work.
Scope and limits. Results are media analogs arising from structured propagation in
Falsification routes. Each case in §5 defines a primary observable and an acceptance gate. A reproduction fails if (i) the observable falls outside the gate under the published YAML and seed, (ii) prescribed ablations (e.g., flatten
How to read §5. Each subsection states the objective and minimal setup (domain,
A summary of all cases appears in Table 1. Figure conventions. Panels typically include: (A) timeline montage; (B) geometry/path; (C) energy budget; (D) the primary metric with acceptance band; (E) a sweep (ICs or profile). Captions include grid(s),
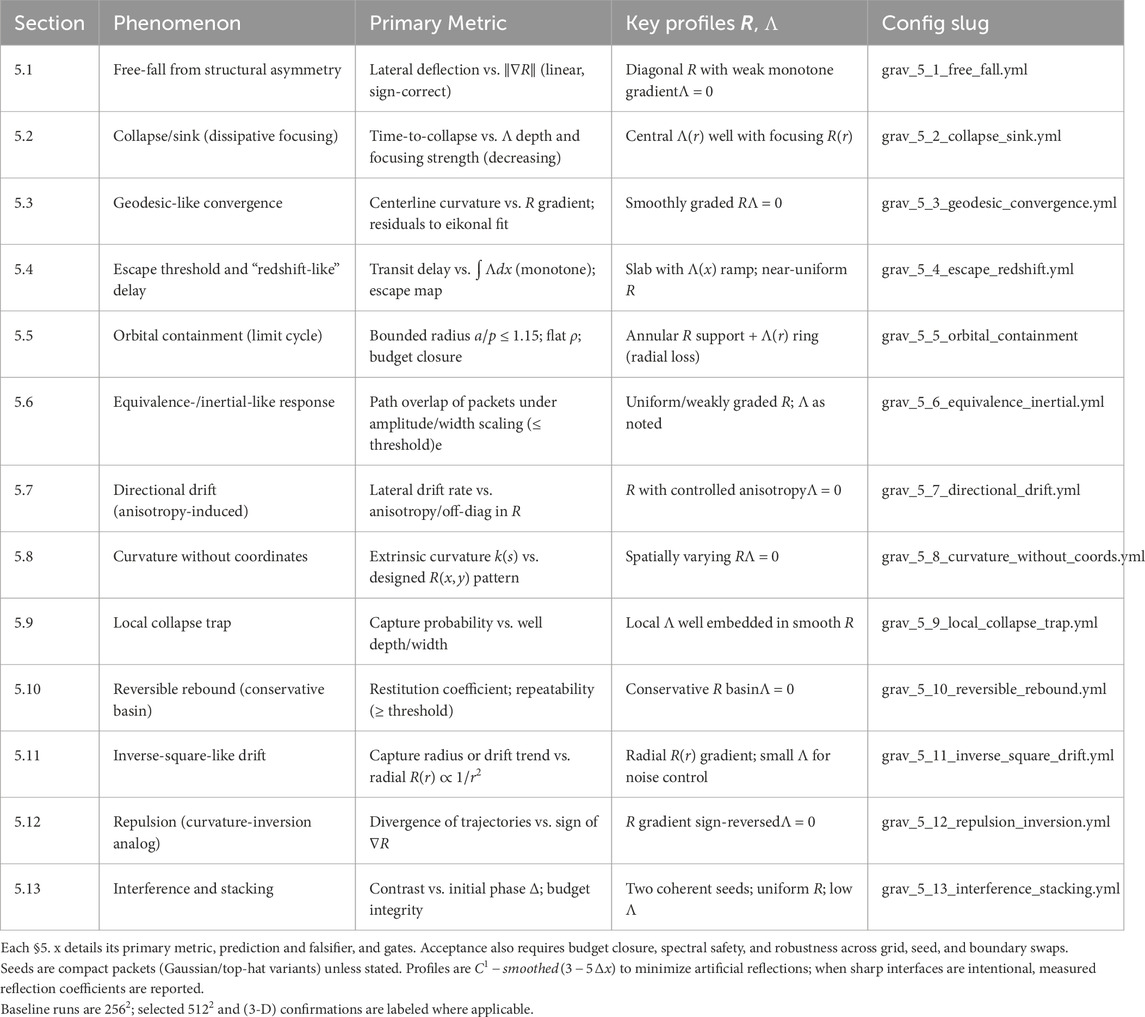
Table 1. Simulation suite overview: phenomenon, primary metric, key profiles R,Λ, and configuration slug for Figures 1–13.
5.1 Free-fall acceleration from structural asymmetry
5.1.1 Objective
Demonstrate that a compact packet acquires a systematic lateral deflection when traversing a weak spatial gradient in
5.1.2 Minimal setup
• Domain and BCs: 2-D grid (2562), absorbing boundaries with graded sponge; boundary flux tallied (§4).
• Profiles:
• Seed: Compact packet launched straight across the gradient (zero initial lateral velocity).
• Genesis: Off.
• Config: grav_5_1_free_fall.yml (commit/hash in caption).
5.1.3 Primary metric and gates
• Metric: Bend angle
• Acceptance gates (this subsection):
1. Non-zero, sign-correct
2. Energy budget closure within 1%–3% post-transient, with Rayleigh loss = 0 and decline explained by boundary flux;
3. Spectral safety (sub-Nyquist content);
4. Robustness: reproducible under seed-shape variant; grid-refinement confirmation at 5122 provided in Supplementary Appendix D.
5.1.4 Results (2562 main run)
A small, sign-consistent bend accumulates across the graded region; from the centroid path we obtain
Interpretation. The “free-fall” is an analog arising from spatial inhomogeneity of
5.1.5 Falsification route
• Reverse the gradient:
• Null profile
Repro bundle. Figure assets and recorder outputs (.npz/.csv) for Figure 1 are archived with engine commit < hash> and bundle ID < ID>; see Data and Code Availability.
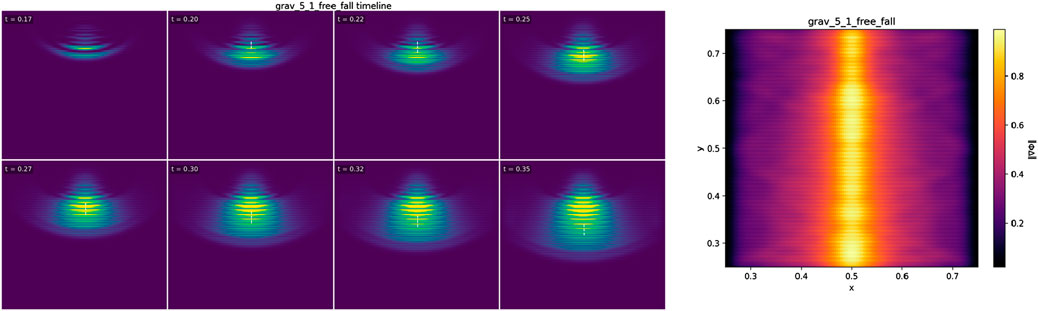
Figure 1. Free-fall from structural asymmetry. A compact packet traverses a weak
5.2 Collapse/sink (dissipative focusing)
5.2.1 Objective
Show that a compact packet undergoes irreversible collapse/trapping when traversing a region that combines focusing transport
5.2.2 Minimal setup
•Domain and BCs: 2-D grid (2562), absorbing boundaries with graded sponge; boundary flux tallied (§4).
• Profiles: Radially focusing
• Seed: Compact packet launched toward the well center.
•Genesis: Off.
• Config: grav_5_2_collapse_sink.yml (commit/hash in caption).
5.2.3 Primary metric and gates
• Metric (collapse time TcT_cTc). Let
• Acceptance gates (this subsection):
1. Monotone rise of
2. Energy budget closure within 1%–3% post-transient, with Rayleigh loss
3. Spectral safety (sub-Nyquist content);
4. Robustness: reproducible under small
5.2.4 Results (2562 main run)
The packet is drawn inward by the focusing
Interpretation. Collapse here is a deterministic analog of trapping from focusing + dissipation:
5.2.5 Falsification route
• Remove
• Flatten
Repro bundle. Figure assets and recorder outputs (.npz/.csv with
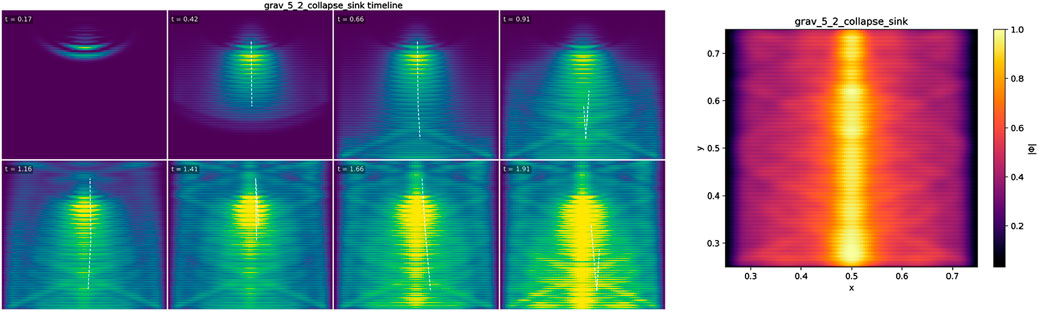
Figure 2. Collapse/sink from dissipative focusing. A compact packet encounters a focusing transport field
5.3 Ray-like bending in a graded medium (geodesic-analog convergence)
5.3.1 Objective
Show that a compact packet follows a ray-like path through a smoothly graded
5.3.2 Minimal setup
• Domain and BCs: 2-D grid (2562), absorbing boundaries with graded sponges; boundary flux tallied (§4).
• Profiles: Smooth,
• Seed: Compact packet launched to traverse the gradient at a shallow incidence (quasi-ray).
• Config: grav_5_3_geodesic_convergence.yml (commit/hash in caption).
5.3.3 Primary metric and gates
• Metric (ray agreement). Extract the packet centerline
Normalized by the path length LLL, and verify sign-correct bending when the gradient is reversed.
•Acceptance gates (this subsection):
1.
2. Energy budget closure within 1%–3% after transients; with
3. Spectral safety (sub-Nyquist content);
4. Robustness: unchanged within error under seed-shape variant and modest apron changes; 5122 confirmation provided in Supplementary Appendix E reproduces
5.3.4 Results (2562 main run)
The packet bends toward decreasing effective transport as it crosses the gradient, and the measured centerline closely tracks the eikonal prediction from §4. The RMS path residual
Interpretation. The observed path is a media analog of a geodesic: bending emerges from spatial variation of
5.3.5 Falsification route
• Gradient reversal: bending must flip sign.
• Null profile: with
• Ray mismatch:
Repro bundle. Figure assets and recorder outputs (.npz/.csv with centerline and eikonal-ray data) for Figure 3 are archived with engine commit < hash> and bundle ID < ID>; see Data and Code Availability.
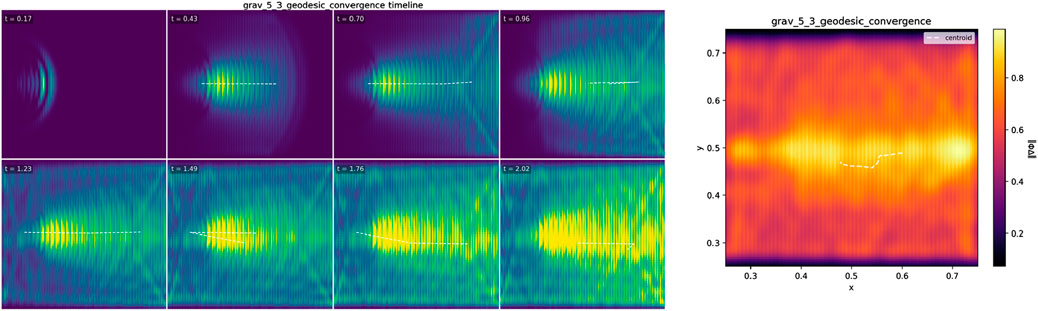
Figure 3. Ray-like bending in a graded medium (geodesic-analog convergence). A compact packet traverses a smooth
5.4 Transit delay and escape threshold (“redshift-like” analog)
5.4.1 Objective
Show that a compact packet experiences a deterministic transit delay when crossing a damping slab
5.4.2 Minimal setup
•Domain and BCs: 2-D grid (2562), absorbing boundaries with graded sponges; boundary flux tallied (§4).
• Profiles: Near-uniform
• Seed: Compact packet launched normal to the slab; reference run uses the same setup with
• Config: grav_5_4_escape_redshift.yml (commit/hash in caption).
5.4.3 Primary metric and gates
• Transit delay
Gate:
• Escape threshold. For larger
• Acceptance (this subsection):
1.
2. Energy budget closure within 1%–3% post-transient, with Rayleigh loss
3. Spectral safety (sub-Nyquist content);
4. Robustness: unchanged within error under seed-shape variant and modest apron changes.
5.4.4 Results (2562 main run)
Crossing the lossy slab introduces a measurable positive delay
Interpretation. The delay arises from propagation in a lossy region; it is an operational analog to redshift/time delay but does not imply potential energy or spacetime curvature. Here,
5.4.5 Falsification route
• Remove loss: With
• Thin the slab: Reducing
• Uniform control: With
Repro bundle. Figure assets and recorder outputs (.npz/.csv with entry/exit times and energy tallies) for Figure 4 are archived with engine commit < hash> and bundle ID < ID>; see Data and Code Availability.
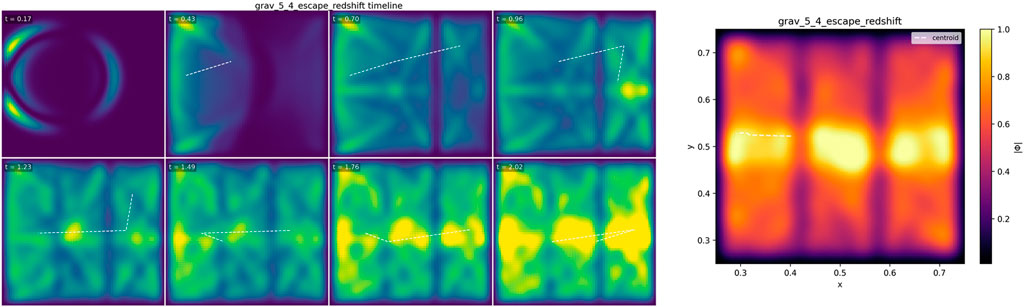
Figure 4. Transit delay and escape threshold in a damping slab (“redshift-like” analog). A compact packet crosses a smooth
5.5 Orbital containment (limit-cycle)
5.5.1 Objective
Demonstrate sustained, bounded circulation (an orbit-like limit cycle) emerging from anisotropic transport
5.5.2 Minimal setup
• Domain and BCs: 2-D grid (2562), reflective basin for the core region with a thin absorbing apron outside to remove far-field clutter (§4).
• Profiles: Disk-shaped basin where
• Seed/IC: Compact packet placed off-center with a tangential bias (initial speed tuned inside the capture band).
• Config: grav_5_5_orbital_containment.yml (commit/hash in caption).
5.5.3 Primary metric and gates
• Metric (bounded orbit). From the centroid path
(boundedness gate). Track the circulation period
•Acceptance (this subsection):
1. Bounded radius (gate above) over ≥5–10 periods;
2. Energy budget closure within 1%–3% post-transient with Rayleigh loss + boundary flux accounting for decay (§4 identity);
3. Spectral safety (sub-Nyquist);
4. Robustness: capture persists across a finite tangential-speed interval (capture band); 5122 confirmation (Supplementary Appendix E) reproduces the metrics within error.
5.5.4 Results (2562 main run)
The packet curves into the annulus, sheds radial energy in the
Interpretation. The containment is a deterministic limit cycle of the
5.5.5 Falsification route
• Remove
• Disrupt
• Leakage/closure: large per-period boundary leakage or budget non-closure falsifies containment for this setup.
Repro bundle. Figure assets and recorder outputs (.npz/.csv with
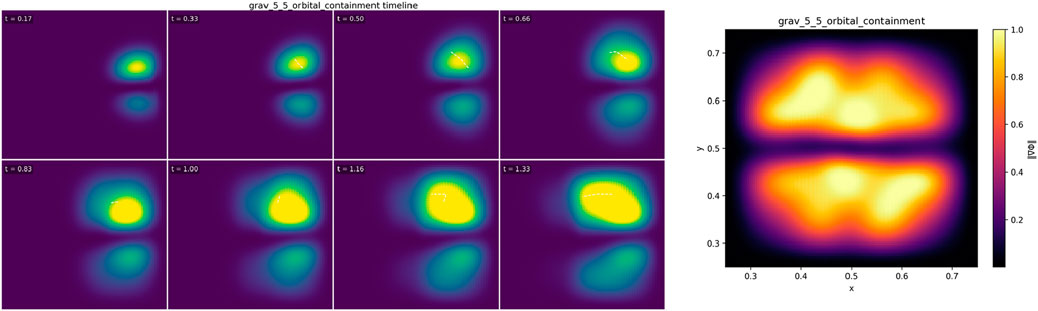
Figure 5. Orbital containment (limit-cycle). A compact packet launched with tangential bias enters a basin where
5.6 Equivalence-/inertial-like response
5.6.1 Objective
Test an equivalence-like property of the medium: packets with different internal properties (amplitude/width) but the same launch kinematics traverse the same path through a given
5.6.2 Minimal setup
•Domain and BCs: 2-D grid (2562), absorbing boundaries with graded sponges; boundary flux tallied (§4).
• Profiles: Uniform or weakly graded
• Seeds: Two (or more) compact packets, A and B, launched from the same point with the same initial velocity; they differ only in amplitude
• Config: grav_5_6_equivalence_inertial.yml (commit/hash in caption).
5.6.3 Primary metric and gates
•Path congruence. Extract centroid paths
with
• Arrival congruence. Difference in arrival time at a fixed exit plane
• Acceptance (this subsection):
1.
2. Energy budget closure within 1%–3% post-transient; with
3. Spectral safety (sub-Nyquist content);
4. Robustness: same verdict under a modest change of (
5.6.4 Results (2562 main run)
Packets A and B co-propagate along the same centerline within the measurement band; εpath\varepsilon_{\text{path}}εpath and
Interpretation. In this regime the update law (linear transport + Rayleigh-type damping) makes the ray geometry depend on
5.6.5 Falsification route
• Amplitude/width sensitivity: if changing (
• Uniform control: with
• Strong loss: if modest
Repro bundle. Figure assets and recorder outputs (.npz/.csv with
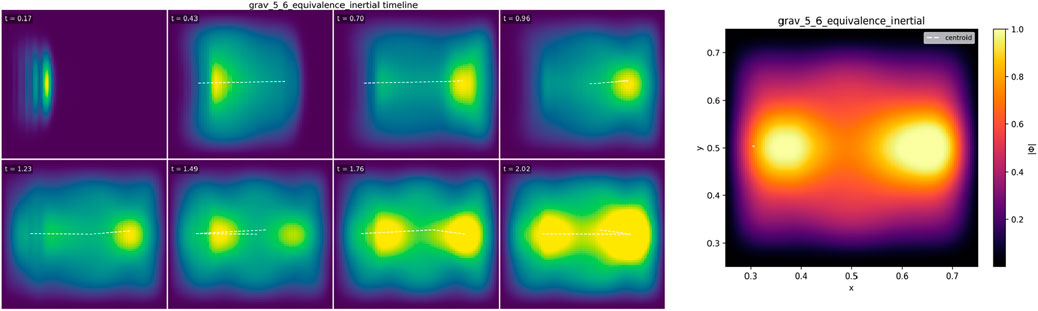
Figure 6. Equivalence-/inertial-like response. Two packets with different amplitude/width but the same launch kinematics traverse the same
5.7 Directional drift from anisotropy (frame-drag–like analog)
5.7.1 Objective
Show that a compact packet develops a steady lateral drift when propagating through a medium with anisotropic transport featuring a controlled off-diagonal component
5.7.2 Minimal setup
•Domain and BCs: 2-D grid (2562), absorbing boundaries with graded sponges; boundary flux tallied (§4).
• Profiles: Spatially uniform magnitude of transport but with a tilted principal frame:
with
• Seed: Compact packet launched along the nominal
• Config: grav_5_7_directional_drift.yml (commit/hash in caption).
5.7.3 Primary metric and gates
• Transverse drift rate. From the centroid path
using a mid-segment linear fit to avoid entrance/exit transients (method §4).
•Acceptance (this subsection):
1. Non-zero
2. Energy budget closure within 1%–3% post-transient; with
3. Spectral safety (sub-Nyquist);
4. Robustness: same verdict under seed-shape variant (Gaussian ↔ top-hat) and modest apron changes; zero drift when
5.7.4 Results (2562 main run)
The centroid accumulates a steady transverse offset while advancing along
Interpretation. Drift arises from principal-axis rotation of the anisotropic transport tensor: rays preferentially align to the faster direction, producing a lateral bias set by
5.7.5 Falsification route
• Turn off the tilt: with
• Flip the sign:
• Over-damp test: introducing moderate
Repro bundle. Figure assets and recorder outputs (.npz/.csv with centroid path and drift estimate, plus energy tallies) for Figure 7 are archived with engine commit < hash> and bundle ID < ID>; see Data and Code Availability.
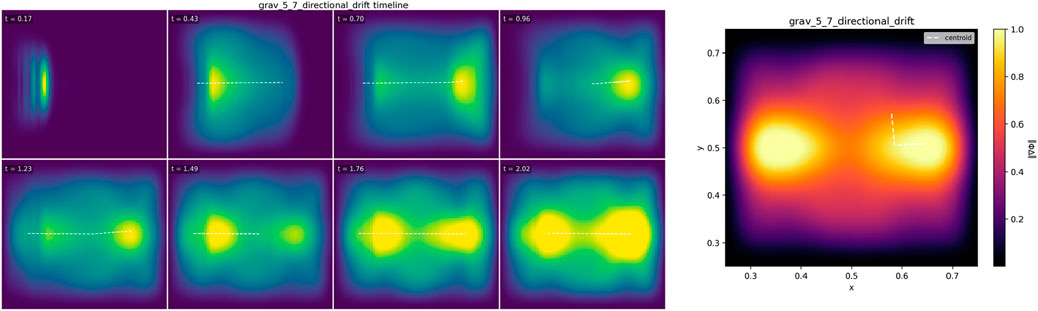
Figure 7. Directional drift from anisotropy (frame-drag–like analog). A compact packet traverses a medium with tilted anisotropic transport
5.8 Curvature without coordinates (ray-shaping via
5.8.1 Objective
Show that we can produce a curved, ray-like trajectory purely by shaping the transport tensor
5.8.2 Minimal setup
•Domain and BCs: 2-D grid (2562), absorbing boundaries with graded sponges; boundary flux tallied (§4).
• Profiles: Smooth,
• Seed: Compact packet launched to enter the guide at shallow incidence (quasi-ray).
• Config: grav_5_8_curvature_without_coords.yml (commit/hash in caption).
5.8.3 Primary metric and gates
5.8.3.1 Curvature agreement
Extract the packet centerline
Gate:
Acceptance (this subsection):
1.
2. Energy budget closure within 1%–3% post-transient; with
3. Spectral safety (sub-Nyquist);
4. Robustness: unchanged within error under seed-shape swap (Gaussian ↔ top-hat) and modest apron changes; null control with
5.8.4 Results (2562 main run)
The packet follows the designed guide, producing a smooth, sign-consistent curvature. The measured
Interpretation. The “curvature” here is a media analog arising from spatial variation of
5.8.5 Falsification route
• Uniform control:
• Pattern reversal/mirroring: flipping the designed guide’s orientation must flip the sign of
• Tolerance breach:
Repro bundle. Figure assets and recorder outputs (.npz/.csv with centerline and
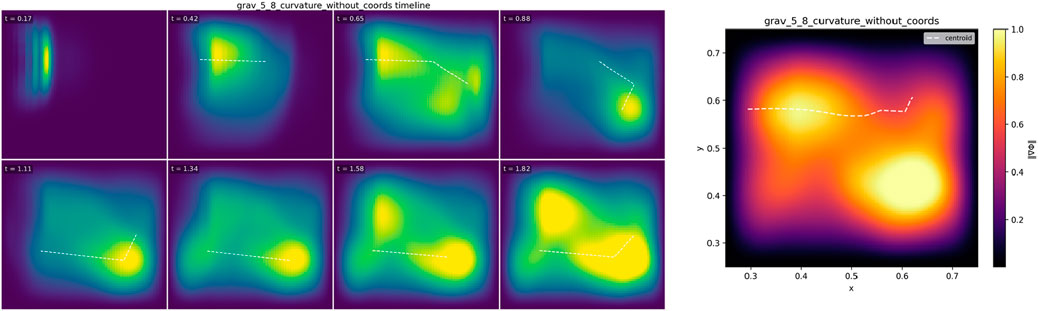
Figure 8. Curvature without coordinates (ray-shaping via
5.9 Local collapse trap
5.9.1 Objective
Show localized trapping: a compact packet enters a finite
5.9.2 Minimal setup
•Domain and BCs: 2-D grid (2562), absorbing boundaries with graded sponges; boundary flux tallied (§4).
• Profiles: Smooth background
• Seed: Compact packet launched toward
• Config: grav_5_9_local_collapse_trap.yml (commit/hash in caption).
5.9.3 Primary metric and gates
• Capture decision + time. Define an inner mask
• Capture gate:
• Capture time:
• Acceptance (this subsection):
1. Gate satisfied (capture) and no re-emergence;
2. Energy budget closure within 1%–3% post-transient; Rayleigh loss
3. Spectral safety (sub-Nyquist);
4. Robustness: verdict unchanged under small changes of
5.9.4 Results (2562 main run)
On entering the
Interpretation. Trapping here is an operational analog produced by directional transport + dissipation.
5.9.5 Falsification route
• Remove loss (control): with
• Shift the well: moving
• Thin the well: reducing
Repro bundle. Figure assets and recorder outputs (.npz/.csv with
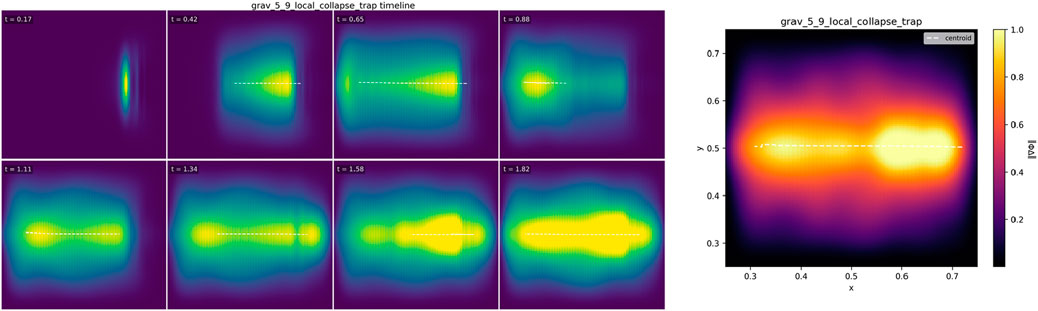
Figure 9. Local collapse trap. A compact packet encounters a localized damping well
5.10 Reversible rebound (conservative basin)
5.10.1 Objective
Demonstrate reversible, near-elastic rebound when a packet encounters a conservative transport basin (structured
5.10.2 Minimal setup
• Domain and BCs: 2-D grid (2562); reflective basin walls that define the conservative region; thin absorbing apron outside to quench far-field clutter (flux tallied; §4).
• Profiles: Conservative
• Seed: Compact packet aimed to strike the basin at a set incidence angle.
• Config: grav_5_10_reversible_rebound.yml (commit/hash in caption).
5.10.3 Primary metric and gates
• Restitution (speed/energy). Let
Gate:
• Specular repeatability. Incidence vs. exit angles obey
•Acceptance (this subsection):
1. Restitution above threshold and specular repeatability satisfied;
2. Energy budget closure within 1%–3% post-transient, with Rayleigh loss = 0 and boundary flux ≈ 0 during the interaction (reflective core; any apron flux is negligible and tallied);
3. Spectral safety (sub-Nyquist);
4. Robustness: verdict unchanged under small incidence-angle and seed-shape variations.
5.10.4 Results (2562 main run)
The packet strikes the conservative
Interpretation. With
5.10.5 Falsification route
• Introduce loss: adding
• Flatten
• Leakage/closure: detectable apron leakage during the interaction or budget non-closure falsifies conservativity for this setup.
Repro bundle. Figure assets and recorder outputs (.npz/.csv with
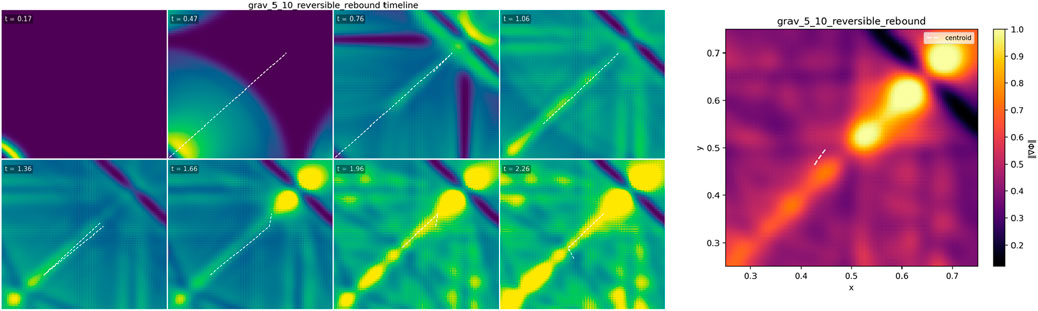
Figure 10. Reversible rebound in a conservative transport basin. A compact packet impinges on a specularly shaped, lossless
5.11 Inverse-square–like radial bias (attraction analog)
5.11.1 Objective
Show a central, inward bias consistent with an inverse-square–like trend when a packet traverses a domain whose transport field
5.11.2 Minimal setup
•Domain and BCs: 2-D grid (2562), absorbing boundaries with graded sponges; boundary flux tallied (§4).
• Profiles: Radially symmetric,
• Seed: Compact packet launched from
• Config: grav_5_11_inverse_square_drift.yml (commit/hash in caption).
5.11.3 Primary metric and gates
• Radial drift exponent. From the centroid path
• Gate: inward drift (correct sign) and
•Acceptance (this subsection):
1. Sign-correct inward drift and α\alphaα within band;
2. Energy budget closure within 1%–3% post-transient; with
3. Spectral safety (sub-Nyquist);
4. Robustness: unchanged within error under modest seed-shape change (Gaussian ↔ top-hat) and gradient-strength perturbation; null control with uniform
5.11.4 Results (2562 main run)
The centroid acquires a steady inward bias while advancing around the center. The mid-track log–log fit of
Interpretation. The inverse-square–like behavior is a media analog: a radial strengthening of
5.11.5 Falsification route
• Reverse the gradient: flipping the sign of
• Flatten the profile: with
• Exponent check: a mid-track fit with α\alphaα far outside the band falsifies the inverse-square-like claim for this setup.
Repro bundle. Figure assets and recorder outputs (.npz/.csv with
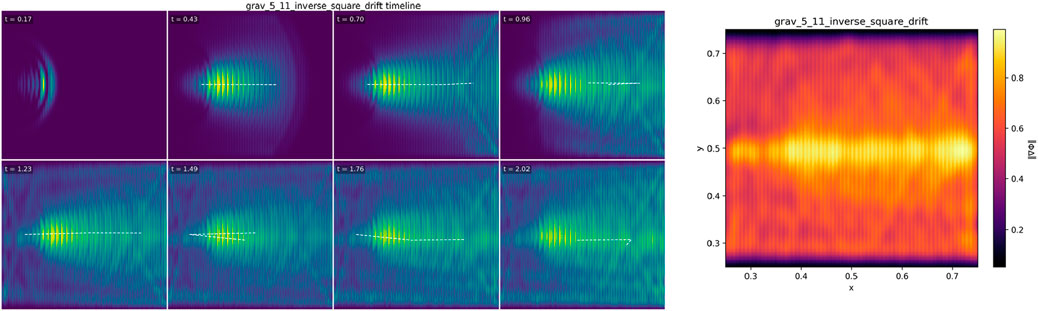
Figure 11. Inverse-square–like radial bias (attraction analog). A compact packet traverses a domain with radially strengthened transport
5.12 Repulsion via curvature inversion (defocusing analog)
5.12.1 Objective
Demonstrate defocusing/outward divergence when the transport gradient is sign-inverted relative to the focusing cases: a compact packet launched across a region with
5.12.2 Minimal setup
• Domain and BCs: 2-D grid (2562), absorbing boundaries with graded sponges; boundary flux tallied (§4).
• Profiles: Smooth,
• Seed(s): (i) A single compact packet for centerline measurement; (ii) an optional two-ray probe: two packets launched with small transverse offset
• Config: grav_5_12_repulsion_inversion.yml (commit/hash in caption).
5.12.3 Primary metric and gates
• Outward bias (single-ray). From the centroid path, compute the signed radial slope
• Divergence (two-ray). Track the transverse separation
•Acceptance (this subsection):
1. Outward bias (single-ray) and positive divergence rate (two-ray) within tolerance;
2. Energy budget closure within 1%–3% post-transient; with
3. Spectral safety (sub-Nyquist);
4. Robustness: verdict unchanged under seed-shape swap (Gaussian ↔ top-hat) and modest apron changes; null control with
5.12.4 Results (2562 main run)
The centerline exhibits a clear outward drift across the graded region (positive mid-track slope
Interpretation. Defocusing here is a transport effect: rays refract away from regions of increasing transport (opposite of the focusing cases). The observable outward bias and separation follow from the geometric-optics limit of
5.12.5 Falsification route
• Gradient reversal: must flip the sign of outward bias (to inward) and suppress divergence.
• Uniform control: with
• Over-strong
Repro bundle. Figure assets and recorder outputs (.npz/.csv with centerline, two-ray separation, and energy tallies) for Figure 12 are archived with engine commit < hash> and bundle ID < ID>; see Data and Code Availability.
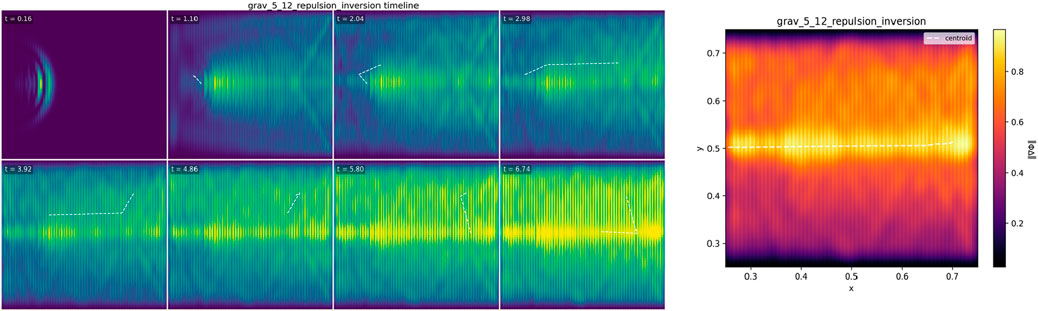
Figure 12. Repulsion via curvature inversion (defocusing analog). A compact packet traverses a smooth
5.13 Interference and stacking
5.13.1 Objective
Demonstrate phase-sensitive superposition in the scalar medium: two coherent packets launched to overlap in a region of (nearly) uniform
5.13.2 Minimal setup
•Domain and BCs: 2-D grid (2562), absorbing boundaries with graded sponges; boundary flux tallied (§4).
• Profiles:
• Seeds: Two equal-envelope compact packets launched from opposite sides to overlap in a fixed region; relative phase
• Config: grav_5_13_interference_stacking.yml (commit/hash in caption).
5.13.3 Primary metrics and gates
• Visibility (contrast) at overlap. In a small ROI centered on the overlap, measure peak and trough of
with
• Constructive gain (“stacking”). Compare the ROI peak at
Gate:
•Acceptance (this subsection):
1.
2. Energy budget closure within 1%–3% post-transient; with
3. Spectral safety (sub-Nyquist content);
4. Robustness: verdict unchanged under small seed-shape swaps (Gaussian ↔ top-hat) and modest timing offsets; incoherent control (random
5.13.4 Results (2562 main run)
At the programmed overlap, the field exhibits phase-dependent contrast: near
Interpretation. Interference and stacking are wave-propagation features of the scalar medium under the linear transport law; they are not gravitational claims. Here,
5.13.5 Falsification route
• Phase scramble: randomizing
• Single-packet control: with one seed removed, the ROI peak must match the baseline (no stacking).
• Loss sensitivity: increasing
Repro bundle. Figure assets and recorder outputs (.npz/.csv with ROI metrics
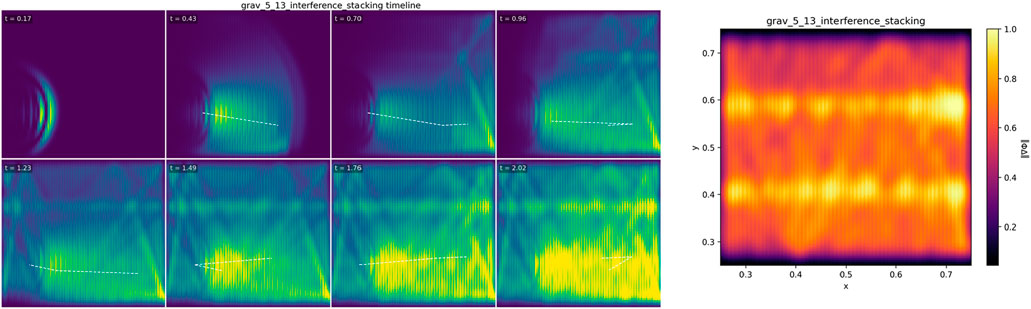
Figure 13. Interference and stacking. Two coherent packets meet in a region of uniform
6 Discussion
6.1 What we demonstrated
Structured propagation in (
6.2 Transport-only vs. transport + loss
Transport-only (
Transport + loss (
6.3 Predictions and falsifiers (operational, testable)
• Linear deflection:
• Delay monotonicity and escape:
• Bounded orbit: with tangentially supportive
• Anisotropy drift: the transverse drift sign matches
• Inverse-square–like trend: in a radial profile with
• Interference control: visibility follows a cosine law in relative phase; constructive gain at
6.4 Numerical integrity and robustness
Main figures use 2562 grids; representative 5122 confirmations for deflection (§5.1) and containment (§5.5) reproduce primary metrics within error (Supplementary Appendix D,E). Profiles are
6.5 Positioning relative to prior work (cf. §2)
Our results align with graded-index and anisotropic transport intuition and intersect the analog-gravity literature at the level of observables: we recover ray-like paths, delays, and capture behaviors via structured propagation in (
7 Limitations and scope
Operational analogs, not GR. The claims in §5 are about observables produced by structured propagation in (
Model class. Results use a linear scalar evolution with static fields
Damping ≠ potential.
Regime of validity (eikonal/gradients). Predictions for bending/curvature (§§5.1, 5.3, 5.8, 5.12) assume smooth
Boundaries. Absorbing sponges approximate open domains and are not reflection-free; reflective basins are idealized. Small boundary effects can bias long-time energy tallies and late-stage trajectories; we mitigate by flux accounting and apron sweeps but cannot eliminate them entirely.
Discretization and stability. Results depend on finite
Parameter sensitivity. Quantities such as capture bands, collapse/escape thresholds, and the inverse-square-like exponent depend on
Dimensionality. Baseline demonstrations are 2-D; selected 3-D confirmations are provided only where noted. We do not assume qualitative invariance of every effect under 3-D geometry.
Out of scope. Nonlinear self-interaction, time-dependent
Mitigations and outlook. We partially address these limits via energy-budget closure, null/negative controls, and grid refinement on representative cases. Future work targets hardware validation, broader parameter sweeps (with uncertainty bands), heterogeneous
3D implications. Our demonstrations are 2D for clarity/efficiency; the framework and code generalize to 3D (Supplementary Appendix C). We expect quantitative shifts in stability/containment: e.g., different scaling of drift and radial “breathing” with basin curvature, and modified far-field decay rates from the 3D Green’s-function structure. The design-forward predictions (deflection vs.
8 Implications and predictions
8.1 Implications
The §5 suite shows that shaping (
8.2 Predictions (testable, with falsifiers)
1. Linear deflection (weak gradients).
2. Transit delay and escape.
3. Bounded orbit (limit cycle). With tangentially supportive
4. Anisotropy drift.
5. Inverse-square–like trend. For
6. Phase control.
Each prediction is paired with an explicit falsifier and is reported with energy-budget closure (Rayleigh loss and/or boundary flux; §4). Representative 5122 confirmations appear for deflection and containment (Appx D, E).
8.2.1 Validation pathways
• Deflection/drift: graded-index or tilted-anisotropy plates/waveguides (null
• Delay/escape: programmable lossy slab with
• Containment: annular
• Interference: coherent pair with set
Experimental pathways. The transport tensor
8.3 Outlook
Near-term priorities: (i) hardware-in-the-loop confirmations for deflection (5.1/D) and containment (5.5/E); (ii) parameter-swept capture maps with uncertainty bands; (iii) robustness under heterogeneous/noisy
9 Data, code, and reproducibility
9.1 Dataset (all figures/results)
Record. Simulating Gravitational Dynamics via Scalar Field Propagation: Dataset—Zenodo, version DOI 10.5281/zenodo.17080017; license CC BY 4.0.
Contents. Per-phenomenon bundles (grav_5_1_* … grav_5_13_*) with raw arrays, summary. json, observables. csv, exact YAML configs, figures, and SHA-256 checksums.
Direct pointers for grid-refinement checks.
• §5.1 (Free-fall) 5122 repeat → Supplementary Appendix D. Dataset bundle: grav_5_1_free_fall_512.
• §5.5 (Orbital containment) 5122 repeat → Supplementary Appendix D. Dataset bundle: grav_5_5_orbital_containment_512.
Cite this dataset as:
Toupin, B. (2025). Simulating Gravitational Dynamics via Scalar Field Propagation: Dataset. Zenodo. https://doi.org/10.5281/zenodo.17080017.
9.1.1 Software (URFTSim engine and scripts)
Record. URFTSim (V6-IR) — Zenodo, version DOI 10.5281/zenodo.17088949; license MIT. Includes the simulator, batch/figure scripts, YAML configs, environment files, and CITATION. cff.
Reproducing this paper.
1. Install from the software record (env files provided).
2. Run the exact YAML in the corresponding dataset bundle (configs are mirrored in both records).
3. Generate timelines/exposures with the included scripts and compare metrics to those reported in §5 and Supplementary Appendix D,E.
Cite this software as:
Toupin, B. (2025). URFTSim (V6-IR) [Computer software]. Zenodo. https://doi.org/10.5281/zenodo.17088949.
9.2 Reproduction checklist (what to verify where)
• §5.1 Free-fall: Recompute bend angle and early-time quadratic fit
• §5.5 Orbital containment: Recompute
• Acceptance gates: Each §5 case specifies its metric and pass criteria; reproduced values should fall within the gates given in the figure caption or corresponding appendix.
9.3 Provenance and integrity
• Determinism: All runs specify seeds; results are repeatable under the stated precision.
• Integrity checks: Verify downloads using the SHA-256 checksums shipped alongside each bundle.
• Energy proxy: Definition and caveats are in Supplementary Appendix C.1; raw
9.4 Licensing and reuse
• Data and figures: CC BY 4.0 (attribute the dataset record).
• Code: MIT (retain copyright notice).
10 Conclusion
We presented a unified scalar-propagation framework in which structured (
Our contribution is practical and falsifiable. (i) We make the update rules and discrete energy identity operational by tallying Rayleigh loss and boundary flux in every experiment. (ii) We separate transport effects (from
Scope is explicit: these are media analogs, not statements about mass, forces, or spacetime curvature. Agreement with eikonal predictions is treated as an observable mapping to
The framework carries predictive value: linear deflection vs.
Looking ahead, we target (i) hardware-in-the-loop confirmations for deflection and containment; (ii) parameter-swept capture maps with uncertainty bands; (iii) robustness under heterogeneous/noisy
All materials needed to replicate and extend these results are archived (DOI, commit, bundles in §9).
Data availability statement
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding author.
Author contributions
BT: Conceptualization, Methodology, Software, Validation, Formal analysis, Investigation, Data curation, Visualization, Writing – original draft, Writing – review and editing.
Funding
The author(s) declare that no financial support was received for the research and/or publication of this article.
Conflict of interest
Author BT was employed by DIRECTV LLC.
Generative AI statement
The author(s) declare that Generative AI was used in the creation of this manuscript. The author affirms that all scientific content including theoretical models, derivations, simulations, and interpretations was independently developed. Generative AI (OpenAI ChatGPT) was used solely for technical assistance in simulation rendering, language refinement, and formatting. No scientific results or theoretical frameworks were generated by AI. All final content was authored, reviewed, and verified by the human researcher.
Any alternative text (alt text) provided alongside figures in this article has been generated by Frontiers with the support of artificial intelligence and reasonable efforts have been made to ensure accuracy, including review by the authors wherever possible. If you identify any issues, please contact us.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fphy.2025.1672745/full#supplementary-material
References
3. Carroll SM. Spacetime and geometry: an introduction to general relativity. San Francisco: Addison-Wesley (2004).
4. Unruh WG. Experimental black-hole evaporation? Phys Rev Lett (1981) 46:1351–3. doi:10.1103/PhysRevLett.46.1351
5. Visser M. Acoustic Black holes: horizons, ergospheres and hawking radiation. Class Quan Grav (1998) 15:1767–91. doi:10.1088/0264-9381/15/6/024
6. Barceló C, Liberati S, Visser M. Analogue gravity. Living Rev Relativ (2011) 14:3. doi:10.12942/lrr-201-3
7. Leonhardt U. Optical conformal mapping. Science (2006) 312(5781):1777–80. doi:10.1126/science.1126493
8. Philbin TG, Kuklewicz C, Robertson S, Hill S, König F, Leonhardt U. Fiber-optic analogue of the event horizon. Science (2008) 319(5868):1367–70. doi:10.1126/science.1153625
9. Pretorius F. Evolution of binary black-hole spacetimes. Phys Rev Lett (2005) 95:121101. doi:10.1103/PhysRevLett.95.121101
11. Baumgarte TW, Shapiro SL. Numerical relativity: solving einstein’s equations on the computer. Cambridge: Cambridge University Press (2010).
12. Dyson FW, Eddington AS, Davidson C. A determination of the deflection of light by the Sun’s gravitational field. Philos Trans R Soc A (1920) 220:291–333. doi:10.1098/rsta.1920.0009
13. Shapiro II. Fourth test of general relativity. Phys Rev Lett (1964) 13:789–91. doi:10.1103/PhysRevLett.13.789
14. Pound RV, Rebka GA. Apparent weight of photons. Phys Rev Lett (1960) 4:337–41. doi:10.1103/PhysRevLett.4.337
15. Pendry JB, Schurig D, Smith DR. Controlling electromagnetic fields. Science (2006) 312(5781):1780–2. doi:10.1126/science.1125907
18. Cerjan C, Kosloff D, Kosloff R, Reshef M. A nonreflecting boundary condition for discrete acoustic and elastic wave equations. Geophysics (1985) 50(4):705–8. doi:10.1190/1.1441945
19. Berenger J-P. A perfectly matched layer for the absorption of electromagnetic waves. J Comput Phys (1994) 114(2):185–200. doi:10.1006/jcph.1994.1159
20. Einstein A. Die Grundlage der allgemeinen Relativitätstheorie. Annalen der Physik (1916) 49(7):769–822. doi:10.1002/andp.19163540702
21. Brans C, Dicke RH. Mach's principle and a relativistic theory of gravitation. Phys Rev (1961) 124:925–35. doi:10.1103/physrev.124.925
22. Sakharov AD. Vacuum quantum fluctuations in curved space and the theory of gravitation. Sov Phys Dokl.* (1968) 12:1040–1.
23. Jacobson T. Thermodynamics of spacetime: the einstein equation of state. Phys Rev Lett (1995) 75:1260–3. doi:10.1103/physrevlett.75.1260
24. Verlinde E. On the origin of gravity and the laws of newton. J High Energ Phys (2011) 2011(4):29. doi:10.1007/jhep04(2011)029
26. Leonhardt U, Piwnicki P. Relativistic effects of light in moving media with extremely low group velocity. Phys Rev Lett (2000) 84:822–5. doi:10.1103/physrevlett.84.822
27. Barceló C, Liberati S, Visser M. Analogue gravity. Living Rev Relativity (2011) 14:3. doi:10.12942/lrr-2011-3
28. Turing AM. The chemical basis of morphogenesis. Philosophical Trans R Soc B (1952) 237:37–72. doi:10.1098/rstb.1952.0012
31. Gomes H, Gryb S, Koslowski T. Einstein gravity as a 3D conformally invariant theory. Quan Grav (2011) 28:045005. doi:10.1088/0264-9381/28/4/045005
32. Rovelli C, Smolin L. Loop space representation of quantum general relativity. Nucl Phys B (1990) 331(1):80–152. doi:10.1016/0550-3213(90)90019-a
34. Courant R, Friedrichs K, Lewy H. On the partial difference equations of mathematical physics. IBM J (1967) 11(2):215–34. doi:10.1147/rd.112.0215
41. Bateman H. On dissipative systems and related variational principles. Phys Rev (1931) 38(4):815–9. doi:10.1103/physrev.38.815
43. Hossenfelder S, Mistele T. A bimetric theory with exchange symmetry. Phys. Rev. (2008) 78. doi:10.1103/PhysRevD.78.044015
45. Padmanabhan T. Thermodynamical aspects of gravity: new insights. Rep Prog Phys (2010) 73:046901. doi:10.1088/0034-4885/73/4/046901
46. Poisson E. The motion of point particles in curved spacetime. Living Rev Relativity (2004) 7(1):6. doi:10.12942/lrr-2004-6
47. Jacobson T. Trans-planckian redshifts and the substance of the space-time river. Prog Theor Phys Suppl (1999) 136:1–17. doi:10.1143/ptps.136.1
Keywords: analogue gravity, scalar-field propagation, anisotropic wave equation, graded-index media, damping, geodesic analogue, orbital containment, reproducible simulations
Citation: Toupin B (2025) Simulating gravitational dynamics via scalar field propagation. Front. Phys. 13:1672745. doi: 10.3389/fphy.2025.1672745
Received: 24 July 2025; Accepted: 26 September 2025;
Published: 11 November 2025.
Edited by:
Jisheng Kou, Shaoxing University, ChinaReviewed by:
Saravana Prakash Thirumuruganandham, SIT Health, EcuadorSaken Toktarbay, Al-Farabi Kazakh National University Institute of Experimental and Theoretical Physics, Kazakhstan
Copyright © 2025 Toupin. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Brendan Toupin, YmJ0b3VwaW5AZ21haWwuY29t