 Pakeeza Ashraf
Pakeeza Ashraf Mehak Sabir1
Mehak Sabir1 Kottakkaran Sooppy Nisar
Kottakkaran Sooppy Nisar- 1Department of Mathematics, Government Sadiq College Women University, Bahawalpur, Pakistan
- 2Faculty of Mathematics and Statistics, Ton Duc Thang University, Ho Chi Minh City, Vietnam
- 3Department of Mathematics, College of Arts and Sciences, Prince Sattam bin Abdulaziz University, Wadi Aldawaser, Saudi Arabia
- 4Faculty of Mathematics and Statistics, Ton Duc Thang University, Ho Chi Minh City, Vietnam
In this paper, we present the shape-preserving properties of the four-point ternary non-stationary interpolating subdivision scheme (the four-point scheme). This scheme involves a tension parameter. We derive the conditions on the tension parameter and initial control polygon that permit the creation of positivity- and monotonicity-preserving curves after a finite number of subdivision steps. In addition, the outcomes are generalized to determine conditions for positivity- and monotonicity-preservation of the limit curves. Convexity-preservation of the limit curve of the four-point scheme is also analyzed. The shape-preserving behavior of the four-point scheme is also shown through several numerical examples.
1. Introduction
Subdivision Schemes (SS) are iterative algorithms for constructing smooth curves/surfaces from a given control polygon/mesh. The advantages of such schemes are that they are easy to use, simple to investigate, and highly flexible. The popularity of SS is increasing in various applications such as in computer-aided geometric design, computer graphics, computer animation, signal processing, and commercial industry due to their attractive properties. Shape-preservation of the subdivision curve has significant importance in geometric shape design. Shape-preserving SS are extensively used in the design of curves to manage and predict their shape according to the shape of initial control points. Differential equations are used for mathematical modeling of many phenomena. Different techniques are being used to solve boundary value problems [1] and non-linear problems [2]. In the same way, SS can also be used to solve fractional differential equations such as [3–7].
Rham [8] was the first to present an SS with C0 continuity to attain a smooth curve. Afterward, Chaikin [9] introduced a corner-cutting approximating scheme with C1 continuity. Dyn et al. [10] developed a four-point binary interpolating scheme that is capable of generating a C1-continuous limit curve. Dyn et al. [11] formulated the convexity-preserving property of the famous four-point interpolatory scheme [10] by taking into account that the initial control points are convex. Kuijt and Damme [12] presented a series of local non-linear interpolating schemes that preserve monotonicity. With time, the research community started taking an interest in ternary SS because, by increasing arity from binary to ternary, one can improve the order of continuity of the limit curve without significantly increasing support width [see Beccari et al. [13]]. Hassan et al. [14] constructed a four-point ternary interpolatory scheme with a tension parameter. Cai [15] derived conditions on this parameter to ensure convexity preservation of the limit curve. Pitolli [16] examined the shape-preserving properties of a ternary scheme with bell-shaped masks.
Most of the SS offered in literature are stationary, but this limits the application of the schemes. To reproduce conics, spirals, and polynomial curves, one has to opt for non-stationary schemes. Beccari et al. [17] presented a C1 four-point binary non-stationary interpolating scheme. Akram et al. [18] analyzed the shape-preserving properties of this scheme [17]. Beccari et al. [19] also offered a four-point ternary non-stationary interpolatory scheme with a tension parameter. They showed that the proposed scheme can generate a variety of curves within the C2-continuous range of its tension parameter. Ghaffar et al. [20, 21] introduced odd and even point non-stationary binary SS with a shape parameter for curve design. Ghaffar et al. [22] also presented a new class of 2m−point non-stationary SS with some attractive properties such as torsion, continuity, monotonicity, curvature, and convexity preservation.
This research aims to completely explore the shape-preserving properties of the four-point ternary non-stationary interpolatory scheme [19] (the four-point scheme). We formulate the necessary conditions on the tension parameter of the scheme and initial control points that permit the creation of positivity- and monotonicity-preserving curves after finite iteration levels. Beccari et al. [19] visually demonstrated that, for an initial convex control polygon, the four-point scheme did not generate convex curves. In this regard, we establish the conditions on the tension parameter that prove that the four-point scheme does not generate convexity-preserving limit curves.
The rest of the paper is designed as follows. In section 2, we present the four-point scheme and recall some of its important results. The positivity-preserving and monotonicity-preserving properties of the four-point scheme are proved in sections 3 and 4, respectively. In section 5, the convexity-preserving property of the four-point scheme is discussed. Some numerical examples are given in section 6 to analyze and demonstrate the shape-preserving properties of the four-point scheme. Conclusions are drawn in the last section.
2. The Four-Point Scheme
Beccari et al. [19] presented a four-point scheme involving a tension parameter. For given initial control polygon and for the set of control points at the jth refinement level , j ∈ ℕ0: = ℕ ∪ {0}, the control points at the (j + 1)th refinement level can be obtained by the rules:
where,
and,
The four-point scheme (1) generates C2-continuous limit curves for any choice of the initial tension parameter β0 in the interval [−2, +∞[\{−1}. For the initial parameter β0 ∈ [−2, +∞[\{−1}, the recurrence relation in (3) satisfies the property:
Proposition 1.
Given the initial parameter β0 ∈ [−2, +∞[\{−1}, the parameter given in (2) satisfies the property:
3. Positivity Preservation
In this section, we discuss the positivity-preserving property of the four-point scheme (1), which can be obtained by taking and , j ∈ ℕ0.
Lemma 2.
Let the initial control points be positive, i.e., , i ∈ ℤ, for any j ∈ ℕ0, such that:
then , Fj < αj, j ∈ ℕ0, i ∈ ℤ, i.e., the control points generated by the four-point scheme (1) at the jth refinement level are also positive.
Proof.
As , we have:
The proof of Lemma 2 is obtained by induction on j.
• By hypothesis, the holds for j = 0, i.e., .
• Suppose, by induction hypothesis and Fj < αj, i ∈ ℤ and for some j ∈ ℕ. Now, we prove that and Fj+1 < αj.
Obviously, and .
By the definition of the four-point scheme (1), we have:
Consider
As we know that , it is also clear that , for . This implies that:
In the same way, we can get , so we have .
In order to prove Fj+1 < αj, we show that and . For this, consider:
So, we have:
Since , it is also clear that , for and . This implies that . Thus, we have:
Similarly, we can have and . Thus, it shows that . In the same way, it can be shown that when and . Since, , so Fj+1 < αj.
Lemma 2 examines the positivity-preservation of the four-point scheme (1) for the finite number of j subdivision steps. Henceforth, Theorem 3 is given to build up the positivity-preserving condition in the limiting case, as j → ∞. It can be observed that the parameter given in (2) fulfills Thus, in Theorem 3, and the proof can be followed from Lemma 2 easily.
Theorem 3.
Suppose that the initial control points are positive, with the end goal that:
at that point, the limit curves generated by the four-point scheme (1) are positive.
4. Monotonicity Preservation
The monotonicity-preservation property of the four-point scheme (1) which can be obtained by defining the first-order divided difference by and taking examined in this section.
The next lemma is given to build the monotonicity-preserving condition for the finite number of j subdivision steps.
Lemma 4.
For j ∈ ℕ, suppose that the initial control points are strictly monotonically increasing, i.e., , such that:
Then the control points generated by the four-point scheme (1) at the jth subdivision step are still strictly monotonically increasing.
Proof.
First-order divided differences for the four-point scheme (1) can be obtained as:
As , so it gives
The proof of Lemma 4 proceeds by induction on j.
• By hypothesis, the assertion holds for j = 0, i.e.,
• Suppose by induction hypothesis and Qj ≤ ηj, i ∈ ℤ and for some j ∈ ℕ. Now we prove that and Qj+1 ≤ ηj.
To prove , we show that:
For this consider,
As we know that , and it is also clear that , for and . This implies that,
In the same way, it can be proved that and .
This implies that we have . Moreover, to verify Qj+1 ≤ ηj, we show that and . For this, consider:
thus,
Using (11), as . Further, Nm1 of (12) fulfills
Since , and it is clear that , for and . Thus, from (12), we have This implies that:
Similarly, it is easy to show that and , which leads to .
In the same way, it can be proved that by showing that and . Since , thus Qj+1 ≤ ηj. So, by induction and Qj ≤ ηj, i ∈ ℤ, for some j ∈ ℕ.
Lemma 4 examines the monotonicity preservation of the four-point scheme (1) for the finite number of j subdivision steps. Henceforth, Theorem 5 is given to build up the monotonicity-preserving condition in the limiting case, as j → ∞. It can be observed that the parameter given in (2) fulfills Thus, in Theorem 5 and note that the proof can be followed from Lemma 4.
Theorem 5.
Assume that the initial control points are strictly monotonicallly increasing, with the end goal that
at that point, the limit curves generated by the four-point scheme (1) are strictly monotonically increasing.
5. Convexity Preservation
In this section, we examine the convexity-preserving property of the four-point scheme (1). Basically, a subdivision scheme satisfies the convexity-preserving property if, for an initial convex control polygon, the limit curves generated by the scheme preserve the convexity of the initial data. For a subdivision scheme, the convexity-preserving property is attained if, at each refinement level, the second-order divided differences of the scheme are all positive. Specifically, for a given jth-level sequence of real values located at regularly spaced parameter values , the second-order divided difference of the scheme is defined by and, for convexity preservation, holds.
Beccari et al. [19] showed that, for an initial convex control polygon, the four-point scheme (1) fails to generate a convex limit curve when choosing different values of the initial tension parameter β0 in the interval [−2, +∞[\{−1}. In Figures 1A–D, dotted lines show the initial convex polygon and solid lines represent curves generated by the four-point scheme (1) after one iteration level. It is clear from the figure that the scheme does not preserve convexity.
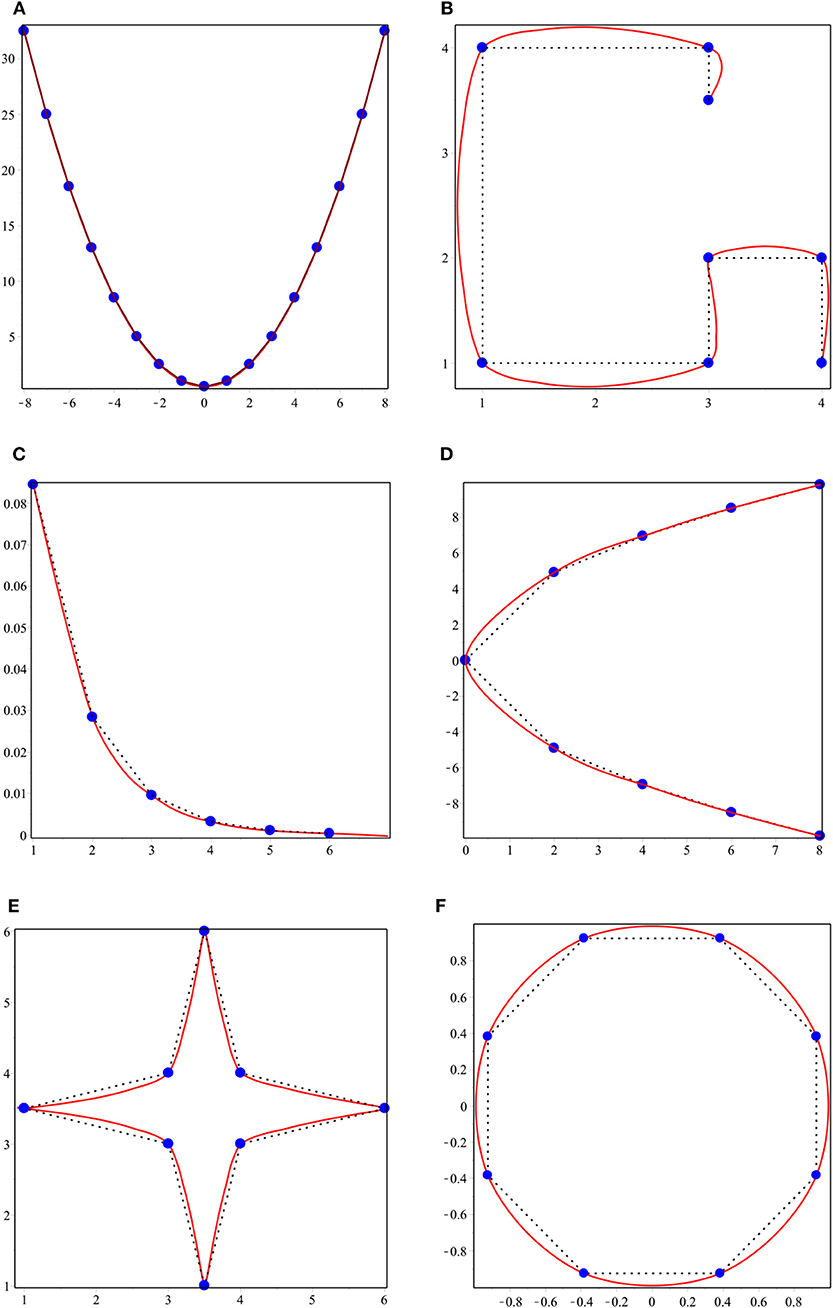
Figure 1. The convexity-preserving limit curves generated by the proposed scheme with the control polygon.
Now, we check whether the condition is satisfied by the four-point scheme (1) or not. By taking , we establish the following result.
Proposition 6.
For j ∈ ℕ, suppose that the initial control points are strictly convex, i.e., , such that
then i.e., the points generated by the four-point scheme (1) at the jth subdivision step are not strictly convex.
Proof.
The second-order divided difference of the four-point scheme (1) can be obtained as:
As , so it gives The proof of Proposition 6 proceeds by induction on j.
• By hypothesis, the assertion holds for j = 0, i.e.,
• Suppose by induction hypothesis and Yj ≤ δj, i ∈ ℤ and for some j ∈ ℕ. Now we show that . Also, simply, we have and .
To prove , it is sufficient to show that:
From (15), we have:
As we know that , and it is also clear that , for and . So, we have:
Now consider from (15)
As we know that , and it is clear that , for and . This implies that:
Now consider,
As we know that , and it is also clear that , for and . This implies that:
By combining (15), (16), and (17), we have , which shows that the four-point scheme (1) does not preserve strict convexity. Some numerical examples are presented to verify and examine the conditions of shape preserving for the 4-point ternary scheme (1). In Examples 1 − 4, the initial set of values is displayed by dotted line segments while the limit curves are marked by solid lines, such that the limit curves generated by the four-point scheme (1) satisfy the shape-preserving condition.
Example 1.
There are several important meteorological data parameters that scientists use for dealing with different climate challenges. Wind velocity data (WVD) is one of them. These data always have a positive value, and the minimum value is ~0. In this example, we choose WVD from Wu et al. [23], as given in Table 1. We use these WVD to demonstrate the positivity-preserving property of the four-point scheme (1). In Figure 2A, the dotted line represents WVD (which is positive) and the solid curve is generated by the four-point scheme (1), which is also positive.

Table 1. Wind data (positive data) [23].
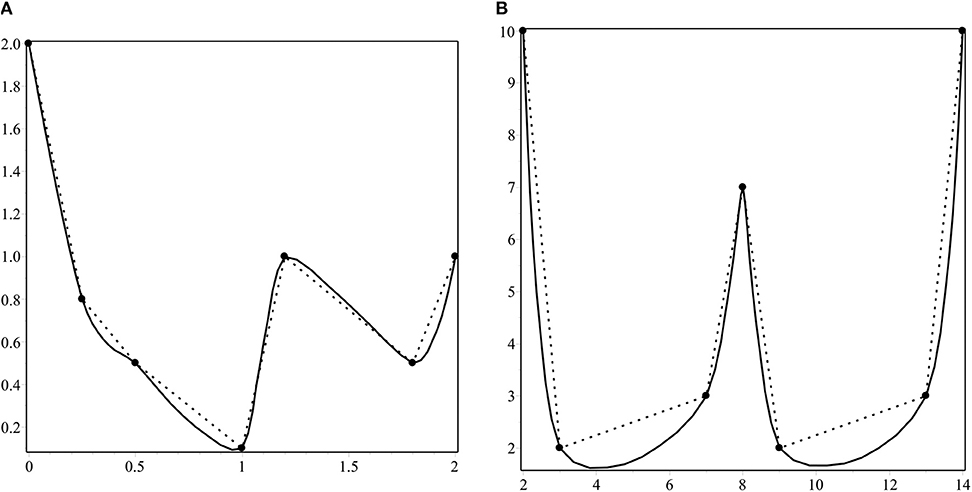
Figure 2. The positivity-preserving curves generated by the four-point scheme (1) for positive initial data.
Example 2.
In this example, we consider experimental data that are quoted from Sarfraz et al. [24]. The proposed data are positive and represent the volume of NaOH vs. HCl in a beaker, as stated in the experimental procedures. These experimental data are presented in Table 2. Figure 2B presents the positivity preservation of the curve generated by the four-point scheme (1). In this figure, the dotted line represents the positive data (which are given in Table 2) and the solid curve is generated by the four-point scheme (1). It is clear that the curve generated by the scheme is also positive.

Table 2. Positive data from Sarfraz et al. [24].
Example 3.
The data given in Table 3 are also experimental data. These data represent the oxygen level from an experiment conducted in the laboratory and are quoted from Butt and Brodlie [25]. We use the proposed data in Figure 3A. In this figure, we find that, by imposing the condition of positivity on the initial data, the four-point scheme (1) is capable of producing a positive curve.

Table 3. Positive data from Butt and Brodlie [25].
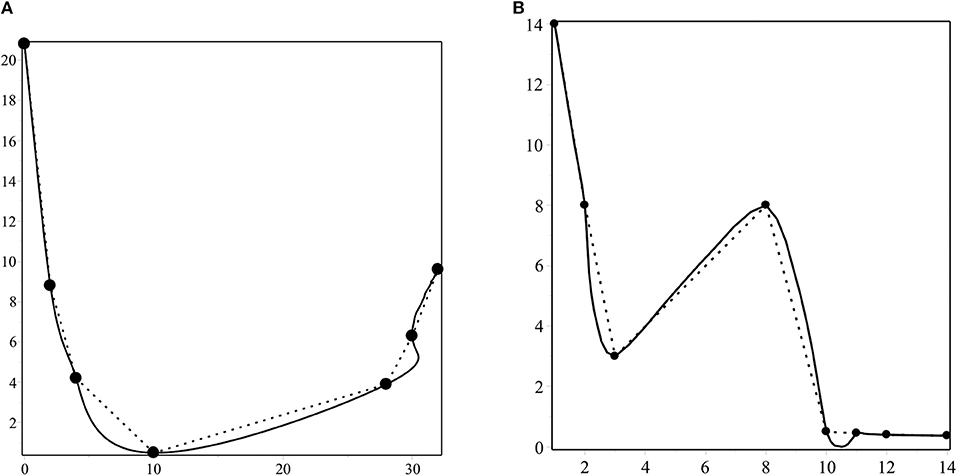
Figure 3. The positivity-preserving curves generated by the four-point scheme (1) for positive initial data.
Example 4.
The data in Table 4 are obtained from Hussain and Ali [26]. These data represent the depreciation of the valuation of the market price of computers installed at City Computer Center. The x-coordinate corresponds to the time in years, and the y-coordinate corresponds to the computer price in Rs. 10,000. Figure 3B generated by the four-point scheme (1) indicates the positivity preservation of the curve generated by the scheme.

Table 4. Positive data from Hussain and Ali [26].
Example 5.
The data given in Table 5 represents monotonic data that are obtained from a monotonic function. From Figure 4A we find that by imposing the condition of monotonicity on the initial data, the four-point scheme (1) is capable of producing a monotonically increasing curve.

Table 5. Monotonic data.
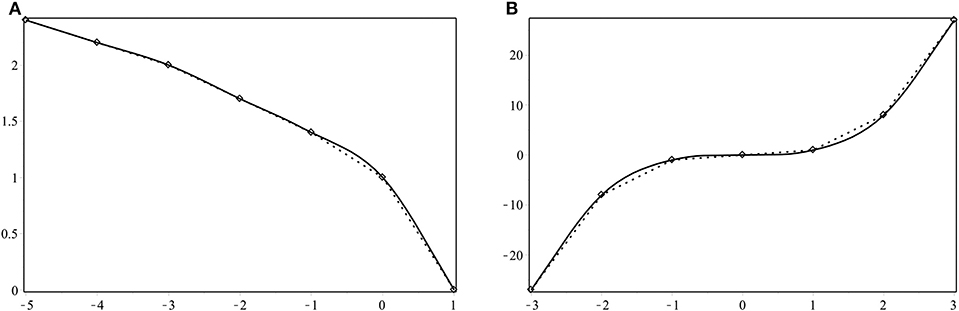
Figure 4. The monotonicity-preserving curves generated by the four-point scheme (1) with monotonic initial data.
Example 6.
In this example, we again consider monotonic data from a monotonic function. These data are presented in Table 6. Figure 4B displays the curve generated by the four-point scheme (1). It is clear from the figure that, for an initial monotonic dataset, the scheme produces a monotonic curve.

Table 6. Monotonic data.
6. Conclusion
In this paper, we have presented the shape-preserving properties of the four-point scheme (1). We have derived the necessary conditions on the initial control points and tension parameter of the scheme to show that the four-point scheme (1) generates positivity- and monotonicity-preserving curves after a finite number of subdivision steps. We have also shown that, for initial convex data, the proposed scheme does not generate a convex curve. Further, we have generalized these results for the positivity- and monotonicity-preservation of the limit curves. Finally, the discussion is followed by several numerical examples. By using this technique, one can analyze the shape-preserving properties of higher arity interpolation and also approximating schemes.
Data Availability Statement
All datasets generated for this study are included in the article/supplementary files.
Author Contributions
PA, AG, and KN: conceptualization. PA, MS, AG, and KN: writing the original manuscript: MS and IK: formal analysis: IK: methodology and supervision: KN and IK: writing review and editing: PA, MS, AG, KN, and IK: software.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
1. Kanwal G, Ghaffar A, Hafeezullah MM, Manan SA, Rizwan M, Rahman G. Numerical solution of 2-point boundary value problem by subdivision scheme. Commun Math Appl. (2019) 10:1–11. doi: 10.26713/cma.v10i1.980
2. Tassaddiq A, Khalid A, Naeem MN, Ghaffar A, Khan F, Karim SAA, et al. A new scheme using Cubic B-Spline to solve non-linear differential equations arising in visco-elastic flows and hydrodynamic stability problems. Mathematics. (2019) 7:1078. doi: 10.3390/math7111078
3. Goufo EFD, Kumar S, Mugisha SB. Similarities in a fifth-order evolution equation with and with no singular kernel. Chaos Solit Fractals. (2020) 130:109467. doi: 10.1016/j.chaos.2019.109467
4. Zaid O, Kumar S. A robust computational algorithm of homotopy asymptotic method for solving systems of fractional differential equations. J. Comput. Nonlinear Dynam. (2019) 14:081004. doi: 10.1115/1.4043617
5. Ahmad E, Oqielat MN, Al-Zhour Z, Kumar S, Momani S. Solitary solutions for time-fractional nonlinear dispersive PDEs in the sense of conformable fractional derivative. Chaos Interdiscip J Nonlinear Sci. (2019) 29:093102. doi: 10.1063/1.5100234
6. Kumar S, Kumar A, Momani S, Aldhaifallah M, Nisar KS. Numerical solutions of nonlinear fractional model arising in the appearance of the stripe patterns in two-dimensional systems. Adv Diff Equ. (2019) 2019:413. doi: 10.1186/s13662-019-2334-7
7. Sharma B, Kumar S, Cattani C, Baleanu D. Nonlinear dynamics of Cattaneo-Christov heat flux model for third-grade power-law uid. J Comput Nonlinear Dynam (2019) 15:9. doi: 10.1115/1.4045406
9. Chaikin GM. An algorithm for high-speed curve generation. Comput Graph Image Proc. (1974) 3:346–9.
10. Dyn N, Levin D, Gregory JA. A 4-point interpolatory subdivision scheme for curve design. Comput Aided Geom Des. (1987) 4:257–68.
11. Dyn N, Kuijt F, Levin D, van Damme R. Convexity preservation of the four-point interpolatory subdivision scheme. Comput Aided Geom Des. (1999) 16:789–92.
12. Kuijt F, van Damme R. Monotonicity preserving interpolatory subdivision schemes. J Comput Appl Math. (1999) 101:203–29.
13. Beccari C, Casciola G, Romani L. Shape controlled interpolatory ternary subdivision. Appl Math Comput. (2009) 215:916–27. doi: 10.1016/j.amc.2009.06.014
14. Hassan MF, Ivrissimitzis IP, Dodgson NA, Sabin MA. An interpolating 4-point C2 ternary stationary subdivision scheme. Comput Aided Geom Des. (2002) 19:1–18. doi: 10.1016/S0167-8396(01)00084-X
15. Cai Z. Convexity preservation of the interpolating four-point C2 ternary stationary subdivision scheme. Comput Aided Geom Des. (2009) 26:560–65. doi: 10.1016/j.cagd.2009.02.004
16. Pitolli F. Ternary shape-preserving subdivision schemes. Math Comput Simul. (2014) 106:185–94. doi: 10.1016/j.matcom.2013.04.003
17. Beccari C, Casciola G, Romani L. A non-stationary uniform tension controlled interpolating 4-point scheme reproducing conics. Comput Aided Geom Des. (2007) 24:1–9. doi: 10.1016/j.cagd.2006.10.003
18. Akram G, Bibi K, Rehan K, Siddiqi SS. Shape preservation of 4-point interpolating non-stationary subdivision scheme. J Comput Appl Math. (2017) 319:480–92. doi: 10.1016/j.cam.2017.01.026
19. Beccari C, Casciola G, Romani L. An interpolating 4-point C2 ternary non-stationary subdivision scheme with tension control. Comput Aided Geom Des. (2007) 24:210–19. doi: 10.1016/j.cagd.2007.02.001
20. Ghaffar A, Ullah Z, Bari M, Nisar KS, Baleanu D. Family of odd point non-stationary subdivision schemes and their applications. Adv Diff Equ. (2019) 2019:171. doi: 10.1186/s13662-019-2105-5
21. Ghaffar A, Bari M, Mudassar I, Nisar KS, Baleanu D. A new class of 2q-point nonstationary subdivision schemes and their applications. Mathematics. (2019) 7:639. doi: 10.3390/math7070639
22. Ghaffar A, Ullah Z, Bari M, Nisar KS, Qurashi AL, Baleanu D. A new class of 2m-point binary non-stationary subdivision schemes. Adv Diff Equ. (2019) 2019:325. doi: 10.1186/s13662-019-2264-4
23. Wu J, Zhang X, Peng L. Positive approximation and interpolation using compactly supported radial basis functions. Math Problem Eng. (2010) 10:964528. doi: 10.1155/2010/964528
24. Sarfraz M, Hussain MZ, Nisar A. Positive data modeling using spline function. Appl Math Comput. (2010) 216:2036–49. doi: 10.1016/j.amc.2010.03.034
25. Butt S, Brodlie KW. Preserving positivity using piecewise cubic interpolation. Comput Graph. (1993) 17:55–64.
Keywords: interpolating, non-stationary, shape-preservation, subdivision scheme, ternary
Citation: Ashraf P, Sabir M, Ghaffar A, Nisar KS and Khan I (2020) Shape-Preservation of the Four-Point Ternary Interpolating Non-stationary Subdivision Scheme. Front. Phys. 7:241. doi: 10.3389/fphy.2019.00241
Received: 16 October 2019; Accepted: 18 December 2019;
Published: 31 January 2020.
Edited by:
Mustafa Inc, Firat University, TurkeyReviewed by:
Amin Jajarmi, University of Bojnord, IranSunil Kumar, National Institute of Technology, Jamshedpur, India
Copyright © 2020 Ashraf, Sabir, Ghaffar, Nisar and Khan. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Ilyas Khan, aWx5YXNraGFuQHRkdHUuZWR1LnZu