 Youyou Zhang1
Youyou Zhang1 Xiaoang Liu
Xiaoang Liu Shuai Li
Shuai Li Bo Cao
Bo Cao Liang Yu
Liang Yu- 1Department of Mechanical Engineering, Hebei University of Technology, Tianjin, China
- 2Department of Engineering Mechanics, Faculty of Civil Engineering and Mechanics, Kunming University of Science and Technology, Kunming, China
- 3School of Civil Aviation, Northwestern Polytechnical University, Xi’an, China
Soft grippers, with their high flexibility and environmental adaptability, have shown promising applications in industrial automation, medical assistance, and underwater operations. This study provides a detailed analysis of various actuation methods, such as fluid pressure, mechanical force, electric fields, magnetic fields, and thermal fields, discussing their principles, applications, and limitations. Additionally, the applications of materials such as hydrogels, elastic polymers, shape memory alloys, shape memory polymers, magnetic materials, and liquid metals in soft grippers are summarized, highlighting their respective advantages and disadvantages. On this basis, a comprehensive analysis and outlook on the performance of soft grippers, the challenges they currently face, and their future development directions have been conducted. This article aims to provide comprehensive theoretical insights for the design and application of soft grippers, thus advancing the field.
1 Introduction
Manipulators, particularly those capable of soft gripping, play an indispensable role in various areas such as object manipulation, medical assistance, and environmental exploration. They are a crucial component of modern technological development. As the application fields continue to expand, designing different end effectors and grasping strategies has become a new research hotspot, aiming to achieve effective and reliable object grasping. Traditional rigid grippers face significant limitations in tasks such as grasping irregular objects and handling fragile items. These limitations make effective grasping operations difficult. This technological gap has driven the rapid development of soft gripping technology. In this context, soft robotic grippers offer innovative solutions due to their unique material properties and biomimetic design concepts. They can tackle complex object grasping problems in diverse scenarios. Nowadays, many international organizations have emphasized the promising prospects of soft robotics. Japan has invested nearly $1 billion through its ‘Robot New Strategy 2022’ to promote the development of medical and agricultural robots (Robot strategy, 2024). Similarly, the 2024 Robotics Roadmap of the United States identifies soft robotics as a core development direction for intelligent embodied systems (CMES, 2024). The European Union plans to launch a collaborative development framework by 2025, highlighting the strategic value of soft gripping technology (Commission, 2024).
With continuous breakthroughs in materials, chemistry, and control systems, and driven by interdisciplinary research and policy support, technological advancements in soft grippers are mainly reflected in three dimensions: actuation innovation, material innovation, and performance improvement. Unlike traditional robots driven by motors, common actuation methods for soft robots include pneumatic drive (Xavier et al., 2022), hydraulic drive (Suzumori and Faudzi, 2018), cable-driven mechanisms (Jumet et al., 2022), and electrical drive (Ma and Sameoto, 2022), reflecting a diversified technological approach. Based on this, the design of actuation system architectures has further diverged: centralized drive systems use a single power source to achieve global control, while distributed drive systems rely on multi-node coordinated responses (Hughes et al., 2016). In terms of materials, soft robotic grippers commonly use highly elastic and extensible smart materials such as shape memory alloys (Otsuka and Ren, 1999; Lobo et al., 2015), hydrogels (Liu X. et al., 2020; Oyen, 2014; Ahmed, 2015), and dielectric elastomers (O’Halloran et al., 2008; Suo, 2010). These materials possess excellent flexibility, outstanding biocompatibility, good electrical conductivity, and unique chemical responsiveness, making them promising solutions for grasping irregular objects, operating in extreme environments (e.g., high temperatures, low temperatures, strong acids/bases), handling biological samples without damage, and achieving self-healing and self-regulation functions. In light of recent progress in actuation strategies and material development, the design of soft grippers is increasingly oriented toward multifunctionality, enabling them to address diverse operational demands such as grasping objects with varying sizes, shapes, and material properties, as well as performing tasks in complex environments, including industrial automation and underwater exploration.
As early as the beginning of the 21st century, researchers began to explore soft grippers. They conducted a series of studies on soft gripper structure design, control methods, and actuation strategies (Boubekri and Chakraborty, 2002). Shintake et al. (2018) provide a comprehensive overview of recent advancements in soft robotic grippers. They classify soft grippers into three primary technological categories: actuation-based systems, stiffness modulation-based systems, and adhesion control-based systems. The study further highlights that, for soft robots requiring enhanced adaptability and interactive capabilities, actuation strategies that incorporate variable stiffness and tunable viscosity are promising and innovative. Zhou L. et al. (2021) classified bioinspired soft grippers into three motion modes: discontinuous bending, continuous bending, and twisting. They also reviewed associated stiffness modulation strategies, including clamping effects and smart fluids such as electrorheological and magnetorheological fluids. From a mechanical perspective, a review (Yang X. et al., 2023) explains how materials or structures change shape under external stimuli (e.g., force, electric fields, magnetic fields, temperature changes). This provides researchers with clear working principles for creating multifunctional deformable materials. Qu et al. (2024) proposed a morphological classification of soft grippers into four types: fingerless, two-fingered, multi-fingered, and multi-joint designs. They further highlighted that future research is expected to focus on developing more complex and flexible gripper architectures. Many reviews have also provided detailed comparisons of soft grippers’ performance across multiple dimensions, such as the size (Dzedzickis et al., 2024) and shape (Tai et al., 2016) of objects being grasped. These comparisons offer important references for the design and optimization of soft grippers.
However, existing reviews have two significant limitations: First, the classification criteria for actuation methods are not systematic, and traditional classification systems lack clarity and unity. Second, performance evaluation metrics are limited, with current research primarily focusing on grasp success rates and neglecting durability and cost-effectiveness analysis of the grippers.
Based on these points, this article will review the latest technologies and research developments in soft grippers from specific aspects, such as actuation methods classified by physical fields, materials, and gripper performance. It will also detail the unique advantages of various types of soft grippers, analyzing their design and application characteristics from multiple angles using typical case studies, aiming to deepen the understanding of soft grippers and promote further research in the field. In contrast to previous studies, this article also addresses aspects such as the cycle life and cost-effectiveness of soft grippers. Finally, by analyzing the advantages and disadvantages of different types of soft robotic grippers, the article delves into current technological bottlenecks and challenges, while also forecasting future development directions and application prospects.
2 Actuation methods
This chapter provides a detailed introduction to soft grippers driven by different physical fields, such as fluid pressure, mechanical force, electromagnetic fields, and thermal fields, including their preparation, implementation mechanisms, application scenarios, innovation, and limitations. Figure 1 exhibits five categories of prevalent actuation modalities, ordered by their frequency of occurrence. Spanning from fluid actuation to temperature actuation, it encompasses technical routes that exploit diverse physical principles to realize the motion or deformation of objects.
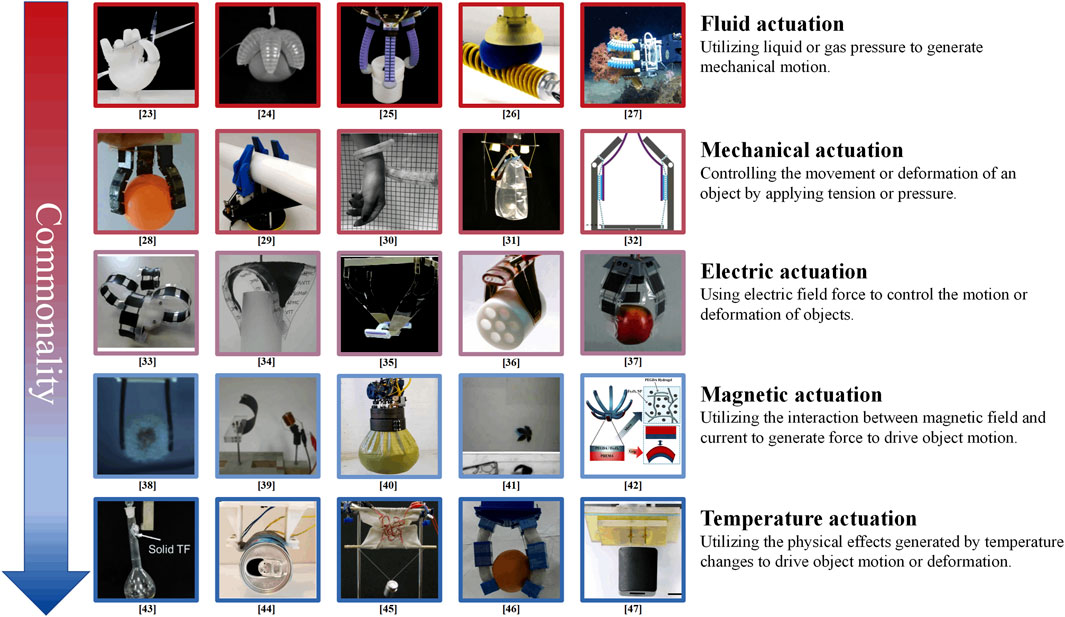
Figure 1. Soft grippers sorted by commonness of actuation method. Pneumatically driven dexterous anthropomorphic hand. Reproduced with permission from Deimel and Brock (2016) Copyright 2016, SAGE Publications. Grippers with embedded pneumatic networks using channels. Reproduced with permission from Ilievski et al. (2011) Copyright 2011, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. Soft gripper for rotational movements. Reproduced with permission from Abondance et al. (2020) Copyright 2020, IEEE. Particle Clogging Gripper. Reproduced with permission from Brown et al. (2010) Copyright 2010, National Academy of Sciences. Deep sea soft robotic manipulation. Reproduced with permission from Galloway et al. (2016) Copyright 2016, Mary Ann Liebert, Inc. An underactuated gripper with adjustable stiffness joint and multiple grasp modes. Reproduced with permission from Firouzeh and Paik (2017) Copyright 2017, IOP Publishing. Underactuated three-fingered robotic hand. Reproduced with permission from Backus and Dollar (2016) Copyright 2016, IEEE. Octopus-like robot arm. Reproduced with permission from Laschi et al. (2012) Copyright 2012, Taylor & Francis. A gripper inspired by the adhesive behavior of geckos. Reproduced with permission from Hawkes et al. (2015) Copyright 2015, IEEE. Soft gripper with bistable structure. Reproduced with permission from Tong Xin (Bistable and Multistable Actuators for Soft Robots, 2023) Copyright 2023, Xi’an University of Architecture and Technology. Dielectric Elastomer Actuated Gripper for Removing Ultra-Small Satellite Debris. Reproduced with permission from Araromi et al. (2014) Copyright 2014, IEEE/ASME. A gripper that achieves the grasping function through self-organized deformation controlled by voltage. Reproduced with permission from Kofod et al. (2007) Copyright 2007, AIP Publishing. A dielectric elastomer gripper based on a bistable structure with low energy consumption. Reproduced with permission from Wang Y. et al. (2019) Copyright 2019, Science China Press. Achieving fast and low-energy gripping through electro-adhesion and electrostatic actuation. Reproduced with permission from Shintake et al. (2016) Copyright 2016, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. Spider-inspired electro-hydrostatic soft joint gripper. Reproduced with permission from Kellaris et al. (2021) Copyright 2021, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. The soft robotic gripper combining porous structures and hard magnetic materials can gently grasp fragile biological specimens. Reproduced with permission from Li et al. (2024a) Copyright 2024, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. The magnetic-driven bionic gripper inspired by the Venus flytrap. Reproduced with permission from Zhang Z. et al. (2019) Copyright 2019, Elsevier. Final gripper assembly with vacuum pump mounted on top. Reproduced with permission from Miettinen et al. (2019) Copyright 2019, Estonian Academy of Sciences. Millimeter-level flexible robotic gripper. Reproduced with permission from Xu et al. (2019) Copyright 2019, AAAS. A magnetic-driven pH-responsive hydrogel-based soft-bodied microrobotic gripper, capable of capturing and releasing drug microspheres in solutions with different pH values, and moving under the influence of a magnetic field for targeted drug delivery. Reproduced with permission from Li et al. (2016) Copyright 2016, IOP Publishing. The liquid gripper based on phase-change ferromagnetic fluid can achieve reversible solid-liquid phase transition through electromagnetic induction heating. Reproduced with permission from Wang et al. (2021) Copyright 2021, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. The soft robotic gripper for adjusting stiffness and adhesion using thermoplastic composites. Reproduced with permission from Coulson et al. (2022) Copyright 2022, Mary Ann Liebert, Inc. Driving shape memory alloys and variable stiffness function of thermoplastic materials through current stimulation. Reproduced with permission from Yuen et al. (2016) Copyright 2016, IEEE. The soft robot gripper based on shape memory alloy. Reproduced with permission from Liu M. et al. (2020) Copyright 2020, SAGE Publications. The soft robot gripper based on shape memory polymer. Reproduced with permission from Linghu et al. (2020) Copyright 2020, AAAS.
2.1 Fluid actuation
The development of soft robotic gripper technology dates back to 1980, when scientists first explored the field, and fluid-driven mechanisms were identified as an important actuation method (Xu et al., 2023). Fluid-driven soft grippers utilize fluid pressure changes to perform gripping and releasing actions. It can be categorized into hydraulic and pneumatic actuation. This section will discuss each in turn.
Pneumatic systems use compressed air as a power source, enabling precise control of the soft gripper’s opening and closing by adjusting the pressure in the pneumatic chambers. This allows for various motion modes, including bending (Ilievski et al., 2011; Kim and Cha, 2020; Alici et al., 2018), extension (Lee and Rodrigue, 2024; De Pascali et al., 2022; Liu X. et al., 2025), rotation (Abondance et al., 2020; Li S. et al., 2017) (Figure 2c), crawl (Wu et al., 2025), and complex grasping postures (Deimel and Brock, 2016; Zhou et al., 2019). Multi-layer structures have been designed by exploiting differences in the elasticity modulus of different materials, achieving controlled bending under pneumatic actuation (Ilievski et al., 2011) (Figure 2d). Building on this, further design optimizations have been made, such as using semi-transparent silicone rubber as the material for the finger tips and embedding inelastic fabric at the base. This configuration ensures that only bending occurs during inflation, preventing radial expansion and significantly enhancing grasping stability (Deimel and Brock, 2016) (Figure 2e). Additionally, (Meng et al., 2017) demonstrated the reliability of soft robots by simulating unit failures in a honeycomb pneumatic gripper, which retained functionality even after losing 50% of its units.
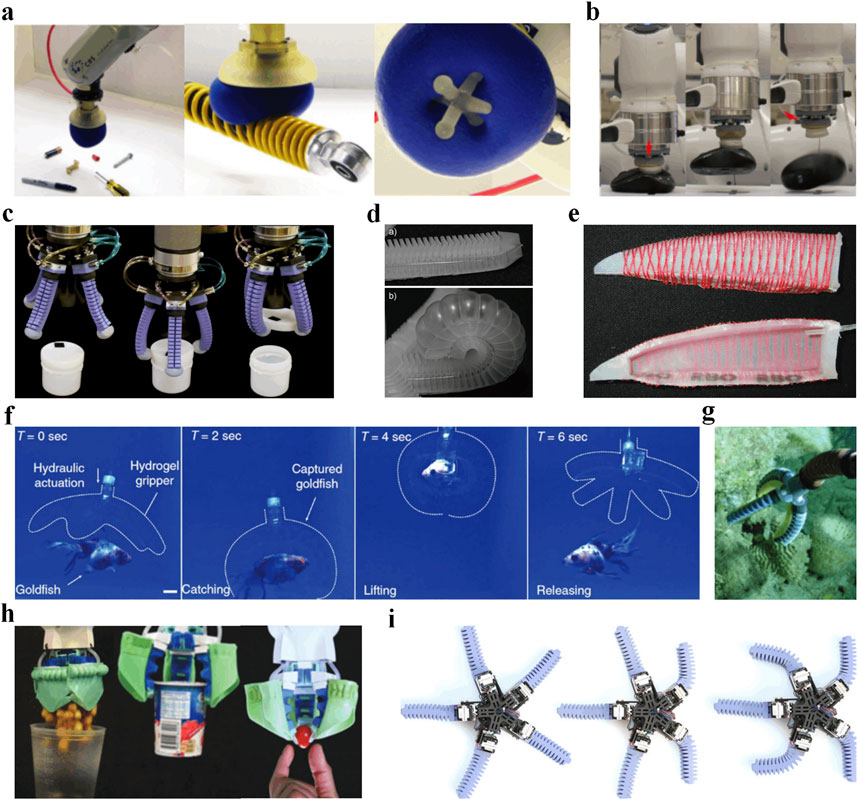
Figure 2. The structure, working principle, and application scenarios of fluid-driven soft robotic grippers. (a) Jamming-based grippers for picking up a wide range of objects without the need for active feedback. Reproduced with permission from Brown et al. (2010) Copyright 2010, National Academy of Sciences. (b) Every work cycle is divided into three parts: First, Align the object in preparation for grasping. Second, automatic suction, and slow lifting of the object, controlled by the hybrid force-position controller. Third, lift the object for a period to verify the longevity of the suction before releasing. Reproduced with permission from Yue et al. (2022) Copyright 2022, IEEE. (c) The hand is shown unscrewing the cap of an empty plastic jar using a heuristic finger gait for rotation. Reproduced with permission from Abondance et al. (2020) Copyright 2020, IEEE. (d) The gripper uses embedded pneumatic networks of channels in elastomers that inflate like balloons for actuation. Reproduced with permission from Ilievski et al. (2011) Copyright 2011, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. (e) The bottom of the gripper’s fingers is embedded with inelastic fabric, which stabilizes the actuator’s shape and reduces the non-functional strain of the rubber. Reproduced with permission from Deimel and Brock (2016) Copyright 2016, SAGE Publications. (f) A transparent hydrogel gripper catches, lifts and releases a live ryukin goldfish. The agile actuation and optical transparency of the hydrogel gripper allow its successful capture of the goldfish. The gripper holds and then releases the captured goldfish without harm owing to the gripper’s softness. Reproduced with permission from Yuk et al. (2017) Copyright 2017, Springer Nature. (g) The soft manipulator articulating downwards to grasp a sponge at approximately 300 m depth. Reproduced with permission from Phillips et al. (2018) Copyright 2018, Springer Nature. (h) A multimodal, reconfigurable workspace soft gripper’s grasping mode (from left to right): chickpeas (scoop grasping mode), yogurt container (wide grasping mode), cherry tomato (pinch grasping mode). Reproduced with permission from Jain et al. (2023) Copyright 2023, Mary Ann Liebert, Inc. (i) Soft robots inspired by echinoderm animals: a sequential rowing-like gait to achieve forward movement. Reproduced with permission from Bell et al. (2022) Copyright 2022, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim.
Unlike traditional gripping methods, some researchers have drawn inspiration from the octopus suckers (Wu M. et al., 2022; Yue et al., 2022) (Figure 2b), tentacles (Calisti et al., 2011), and jellyfish (Becker et al., 2022) to propose adhesive or coiling methods for object grasping. Abondance et al. (2020) examined a simple heuristic finger gait in a pneumatic soft robot hand, which was capable of rotating objects in a manner similar to opening a bottle cap. A vacuum-powered artificial muscle based on origami has been proposed, capable of lifting a payload of up to 40 kg (Lee and Rodrigue, 2019). To meet the need for grasping a variety of objects, the number of actuators in the gripper (from 2 to 6) (Nava et al., 2021) and the structure of the gripper (such as passive pin extensions and bidirectional foldable petal-like structures) (Jain et al., 2023) have been artificially altered by some researchers (Figure 2h). However, the limitation of these systems is the lack of self-adjustment, requiring human intervention.
Pneumatic drive is also applicable in passive universal grippers (Brown et al., 2010; Toyoda et al., 2024; Amend et al., 2012; Li Y. et al., 2017), especially when the shape and precise location of the object are unknown. Experimental verification has shown that a granular clogging gripper can reliably grasp objects with less than a 0.5% volume change. This reduces the complexity of the control system (Brown et al., 2010) (Figure 2a). Further studies (Toyoda et al., 2024) have also been conducted to address the issue of granular clogging grippers being unable to handle flat objects. To solve this, flexible materials with adhesive properties are used as a film to encapsulate the particles, enhancing the gripping force. In addition, researchers have also identified significant contradictions in particle size selection (Wei et al., 2016): Larger particles reduce the number of contact points but weaken shape adaptability. On the other hand, smaller, irregularly shaped particles–such as coffee beans–have poor fluidity, which also affects compliance. This finding provides a key direction for future optimization. Subsequently, Howard et al. (2021) tested the impact of different particle sizes and shapes in 3D printed clogging grippers, and they found that ellipsoidal shapes performed the best. In addition to capturing static objects, (Amend et al., 2012) also developed a throwing function for the pneumatic gripper. By applying forward pressure, objects can be rapidly ejected. This function can be applied to tasks in low-precision environments, such as sorting factory waste bins.
Similarly, hydraulic systems use fluids (water or oil) as the power medium, achieving motion by varying the pressure within hydraulic cylinders. Hydraulic-driven soft grippers can provide substantial force and torque (Hu et al., 2022), enabling precise control over the gripper’s angle (Sangian et al., 2015; Bell et al., 2022; Zhang et al., 2018) (Figure 2i), force, and speed, making them suitable for applications requiring high force output. A hydraulic hydrogel actuator has been proposed (Yuk et al., 2017) (Figure 2f), with its innovation lying in the use of polyacrylamide-alginate hydrogel containing over 90% water by weight, giving it optical and acoustic properties almost identical to water. This allows for optical and acoustic camouflage in aquatic environments. Additionally, in underwater operations, hydraulic-driven soft grippers can withstand high-pressure environments, making them suitable for deep-sea resource extraction or scientific research (Galloway et al., 2016; Phillips et al., 2018; Vogt et al., 2018). For example, Phillips et al. (2018) used compatible materials matching the soft and fragile characteristics of marine organisms as the working fluid, successfully operating at depths exceeding 2300 m (3500 psi) (Figure 2g). Beyond these more established gripper forms, a research group has proposed a fluid-driven multi-bistable suction cup gripper (Breitman et al., 2022; Ben Abu et al., 2023; Veksler et al., 2024), which can achieve controlled, sequential actuation of multiple bistable elements with a single input and could serve as a reconfigurable end effector in the future. With the advancement of industrial automation, the demand for grippers that can precisely control and adapt to different working environments has increased. Electro-hydraulic grippers, a special type of hydraulic-driven soft gripper, are favored for their ability to provide strong clamping forces and flexible control (Park et al., 2020), and such grippers will be discussed in detail in the section on electrostatic actuation.
In summary, fluid-driven soft grippers have been explored earlier and applied more widely than other types. For instance, Beijing Soft Robotics Technology Co., Ltd. (SRT) developed a pneumatic dexterous hand that can perform simple repetitive tasks and handle nearly 96% of irregular and fragile items in industrial production (Tech, 2024), addressing the “last mile” problem in automation. Similarly, Soft Robotics in Massachusetts introduced the mGripAI software package, enabling grasping optimization and intelligent motion control, with a picking speed of over 90 items per minute (Schmalz, 2024). In addition, a portable inflatable shoulder-worn robot has been proposed for industrial support, reducing shoulder muscle activity intensity by about 40% (Zhou et al., 2024). Pneumatic-driven compliance was leveraged to achieve non-destructive grasping of irregularly shaped marine organisms during underwater robotic manipulation tasks (Stuart et al., 2017). While these hydraulic systems demonstrate industrial potential, their reliance on high-pressure pumps, pipelines, and sealing mechanisms increases complexity, cost, and energy consumption, limiting portability and flexibility.
2.2 Mechanical actuation
Mechanically controlled robotic grippers typically utilize external force fields, such as pressure, tension, and friction, to precisely control the deformation and movement of soft structures (Figure 3). Among these, the movement of the end-effector in rope-driven systems is controlled by altering the length of the rope. The general structure of these systems typically includes a traction rope, connecting pulleys, and supporting columns, with segmented connections often being used (Tan C. et al., 2023). Inspired by the multiple degrees of freedom (DOF) and complex movements of human hands, multi-DOF control in rope-driven grippers is achieved through the pulling of the rope, allowing the mimicry of the multi-DOF movements of the human hand (Manti et al., 2015; Lee and Rodrigue, 2019; Rodrigue et al., 2017a). The use of thermally activated shape memory polymers to control joint stiffness was proposed by Firouzeh and Paik (2017), and precise control of single cable tension was focused on by Manti et al. (2015). In biomimetics, inspiration has been drawn from the kinematic principles of octopus tentacles, leading to the proposal of tendon-driven robotic hand designs (Giannaccini et al., 2014; Renda et al., 2012; Laschi et al., 2012). Based on the relationship between the skeletal system, support, movement, and muscle antagonism (Taylor and Kier, 2003), a biomechanical model was developed by Laschi’s research group (Laschi et al., 2012), and the function of a muscle-hydraulic system was successfully simulated by combining longitudinal cables with transverse shape-memory alloy springs. Due to the high adaptability of these structures to human hand joints, rope-driven grippers are often used in medical fields, such as rehabilitation therapy. A review study (Xiong and Diao, 2019) provided a detailed analysis of cable-driven robotic rehabilitation devices, highlighting that they have replaced traditional manual rehabilitation training and improved both the efficiency and effectiveness of the rehabilitation process.
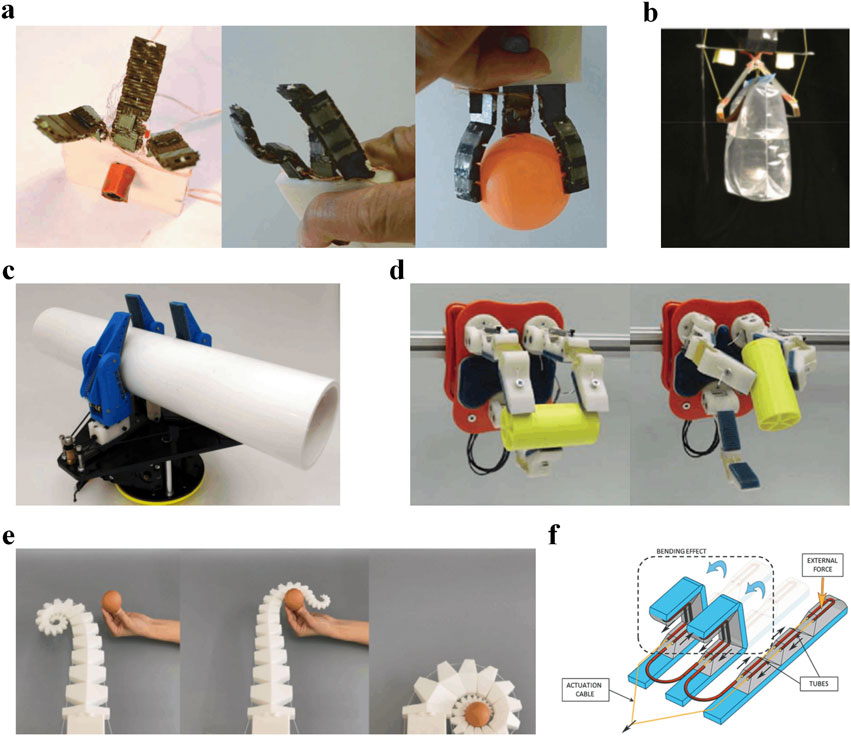
Figure 3. The structure, working principle, and application scenarios of mechanical force-driven soft robotic grippers. (a) An under actuated gripper with adjustable stiffness joint and multiple grasp modes (the spherical grasp mode): the side fingers are oriented according to the shape of the object for better grasp. Reproduced with permission from Firouzeh and Paik (2017) Copyright 2017, IOP Publishing. (b) Objects picked and placed by a robotic arm outfitted with the shear force gripper. Reproduced with permission from Hawkes et al. (2015) Copyright 2015, IEEE. (c) The finger pads are parallel to the object surface and the fingers wrap about the object demonstrating the adaptive behavior of the passive joints and caging capabilities of the single joint fingers. Reproduced with permission from Backus and Dollar (2016) Copyright 2016, IEEE. (d) An actuator in the hand base of the gripper transitions it between power-grasping and lateral-grasping modes. Reproduced with permission from Ma and Dollar (2017) Copyright 2017, IEEE. (e) A gripper actuated by cables morphologically replicate the logarithmic spiral that is ubiquitous in natural organisms. Reproduced with permission from Wang Z. et al. (2024) Copyright 2024, Device. (f) Cable loop for the cabledriven underactuation mechanism. Arrows indicate the path of the actuation cable that is pulled to bend the fingers. Reproduced with permission from Manti et al. (2015) Copyright 2015, Mary Ann Liebert, Inc.
In addition to rope-driven systems, bistable soft robots also utilize externally applied tensile forces for actuation. These structures were initially inspired by the rapid closure of the Venus flytrap’s leaves (Forterre et al., 2005). A review of bistable robots (Chi et al., 2022) introduced the design principles of five basic bistable elements, ranging from 1D to 3D. It was pointed out that this structure can quickly switch between two stable states when triggered externally and release stored energy in a very short period (Bistable and Multistable Actuators for Soft Robots, 2023). The study also analyzed the deformation and response characteristics of thin-plate-hinge and thin-sheet-crease bistable structures and applied them to multi-size grippers. In addition, bistable structures have found applications in the aerospace field, such as in aerial capture (Liu et al., 2023a). To improve the performance of grippers, researchers have explored hybrid solutions incorporating various grasping techniques, proposing an innovative design that combines biomimetic gecko adhesive films with bistable support structures (Hawkes et al., 2015). This design not only enables stable grasping of larger objects, such as basketballs, but also keeps the unit cost below 2, showcasing significant economic and practical advantages.
Rope-driven technology, by mimicking the human hand’s grasping mechanism, can precisely control rope tension and length to achieve complex grasping actions and precise position control. However, similar to hydraulic systems, its dependence on continuous power output requires the use of large motors and transmission mechanisms, which severely limit the miniaturization and integration of the equipment. To address this issue, the introduction of bistable structures has opened a new path. These structures require no continuous external energy supply and only a small amount of energy is needed to switch between stable states, significantly reducing system energy consumption. The applications of bistable structure span multiple domains (Bistable and Multistable Actuators for Soft Robots, 2023): non-adjustable grippers capable of grasping objects of various sizes, actuators achieving large-scale jumping and underwater propulsion; adjustable systems enabling selective grasping, high-speed target capture, and even medical applications such as supporting body cavities; and integrated sensing–actuation designs, such as Venus flytrap-inspired robots, which can detect subtle touches and rapidly capture targets, thereby providing versatile solutions across different scenarios.
2.3 Electric actuation
Electrically-driven soft robotic grippers typically use electroactive polymers (EAPs) as driving materials (Ahn et al., 2022), which deform under the influence of an electric field to enable the gripper’s motion (Figure 4). Among these, dielectric elastomers stand out due to their exceptional actuation strain, speed, compliance, and silent operation, making them highly promising. These materials not only demonstrate broad potential in robotics but have also attracted significant attention in biomedical engineering, flexible electronics, and smart materials. Dielectric elastomer actuators are often referred to as artificial muscles due to their ability to mimic biological muscle characteristics, providing powerful drive support for the development of high-performance soft robotic grippers. As early as 2007, Guggi et al. (Kofod et al., 2007) proposed a gripper based on dielectric elastomers and a plastic framework, and subsequent research led to the design of multiple dielectric elastomer grippers (Li J. et al., 2019; Shian et al., 2015; Shintake et al., 2016; Lau et al., 2017; Shintake et al., 2015; Wang Y. et al., 2019), achieving innovations in the types of objects they can grasp, such as flat paper (Shintake et al., 2016) and raw egg yolks (Lau et al., 2017). Furthermore, to enhance stiffness, researchers proposed variable stiffness dielectric elastomer actuators, coupling rigid fibers (Shian et al., 2015) and low-melting-point alloys (Shintake et al., 2015) with the actuators, resulting in a roughly 90-fold increase in actuator stiffness (Shintake et al., 2015). Due to their similar activation times (0.1–1.1 s) and the use of the same soft materials in a single structure, electroadhesion and granular jamming were combined to perform complex tasks such as opening hard-shell books (granular jamming), flipping pages (electroadhesion), and placing a tea bag into a cup, expanding the possibilities for combining different gripper technologies (Piskarev et al., 2023).
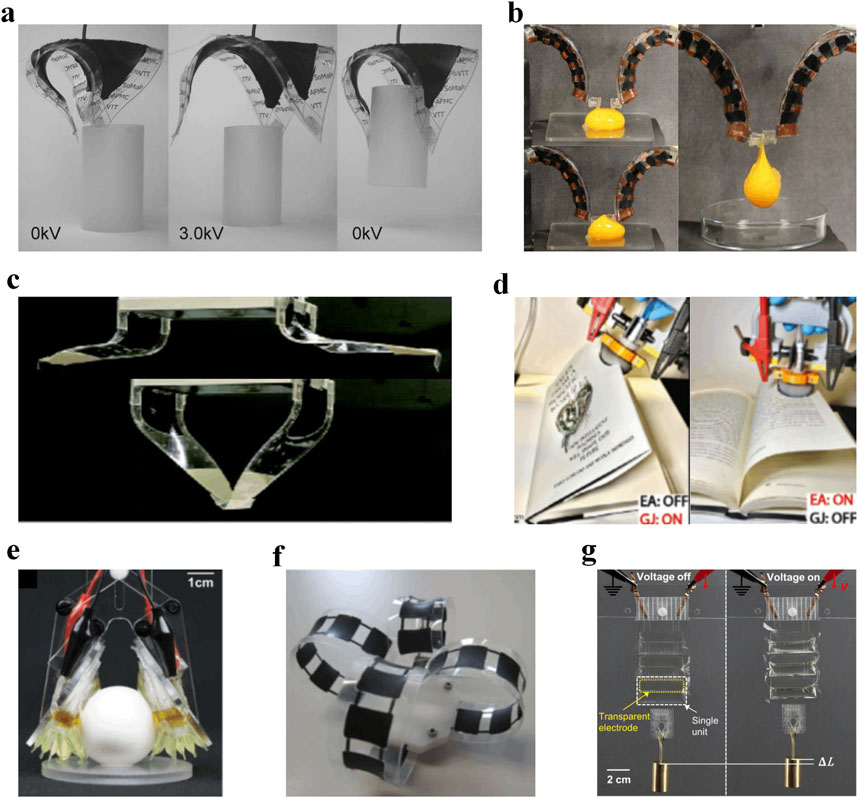
Figure 4. The structure and application scenarios of electrical driven soft robotic grippers. (a) Gripper opens when a voltage of 3.0 kV is applied, enough to grasp objects when the voltage is removed. Reproduced with permission from Kofod et al. (2007) Copyright 2007, AIP Publishing. (b) Double finger gripper opens at 0kV, closes at 3kV, and lifts egg yolk at 6 kV. Reproduced with permission from Lau et al. (2017) Copyright 2017, AIP Publishing. (c) A soft gripper based on bi-stable dielectric elastomer actuator (DEA) inspired by the insect-catching ability of the Venus flytrap. Reproduced with permission from Wang Y. et al. (2019) Copyright 2019, Science China Press. (d) The gripper can be used for complex manipulation such as an interaction with a book: the cover page can be opened by granular jamming (GJ) mode, the pages can be gently turned over using electroadhesion (EA) mode. Reproduced with permission from Piskarev et al. (2023) Copyright 2023, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. (e) A soft gripper fabricated from two modified stacks of donut hydraulically amplified self-healing electrostatic actuators handled fragile objects such as raw egg. Reproduced with permission from Acome et al. (2018) Copyright 2018, AAAS. (f) Model of deployable, multisegment dielectric elastomer minimum energy structures gripper for CleanSpace One. Reproduced with permission from Araromi et al. (2014) Copyright 2014, IEEE/ASME. (g) Three-unit hydraulically amplified self-healing electrostatic actuator shown lifting 20 g on application of 8 kV across the electrodes. Reproduced with permission from Kellaris et al. (2018) Copyright 2018, AAAS.
In addition to dielectric elastomer actuators, electric field-driven systems also include electrostatic soft actuators, electrothermal soft actuators, and electromechanical soft pumps. A review study (Ma and Sameoto, 2022) examined various electrically-driven soft actuators, focusing on their actuation principles, performance comparison, and latest applications. Among them, electrohydraulic soft actuators operate by filling a dielectric liquid bag and applying voltage, where the induced electric field generates Maxwell stress to compress and displace the liquid, driving deformation for grasping (Acome et al., 2018; Kellaris et al., 2018). This technology has been widely applied in soft robotics and origami-inspired designs (Kellaris et al., 2021; Acome et al., 2018; Purnendu et al., 2021a; Purnendu et al., 2021b).
Electric field-driven soft grippers can rapidly respond to electric signals, enabling quick grasping and releasing. However, they require relatively high energy, and the electric drive often leads to electromagnetic (Do et al., 2018; Ahn et al., 2022) and electrothermal coupling effects, which affect the system’s energy efficiency. Electromagnetic drive controls the magnetic field strength by altering the size and direction of the current and can also be applied to control soft robotic motion. Electrothermal coupling, on the other hand, alters the physical properties of materials through temperature changes, allowing for precise control of robot motion. Based on this characteristic, flexible transitions between different drive methods can be achieved, making the system adaptable to the specific environmental demands of its tasks. In practical applications, electrothermal mechanisms have been integrated into various material systems: shape memory polymers (SMPs) are heated to switch between rigid and flexible states for adaptive gripping (Ma and Sameoto, 2022); carbon nanotube or graphene–polymer composites enable electrically controlled bending for underwater propulsion (Ahn et al., 2022); liquid crystal elastomers (LCEs) achieve programmable shape transformations for origami-inspired soft robots (Purnendu et al., 2021a); and electrothermal stiffening elements have been incorporated into minimally invasive surgical tools to provide both compliance during navigation and rigidity for stable manipulation (Shintake et al., 2015). The next two sections will discuss soft grippers driven by magnetic fields and temperature fields in detail.
2.4 Magnetic actuation
Magnetic field-driven soft robotic grippers control soft robots containing magnetic materials by altering the magnetic field, enabling wireless control (Figure 5). These soft grippers can be categorized based on their interaction with the magnetic field, including gradient magnetic field force drive, which generates force by utilizing spatial variations in the magnetic field (Zhang Z. et al., 2019; Shao et al., 2021); magnetic dipole-dipole interaction drive, which uses the interaction between magnetic dipoles for grasping (Guan et al., 2022; McDonald et al., 2020), and magnetic torque drive, which adjusts the magnetization direction of hard magnetic particles to produce shape changes (Bastola and Hossain, 2021; Lucarini et al., 2022). Most existing actuators use permanent magnets for driving (Eshaghi et al., 2021), which generate a magnetic field without consuming electrical energy to maintain the desired magnetic field.
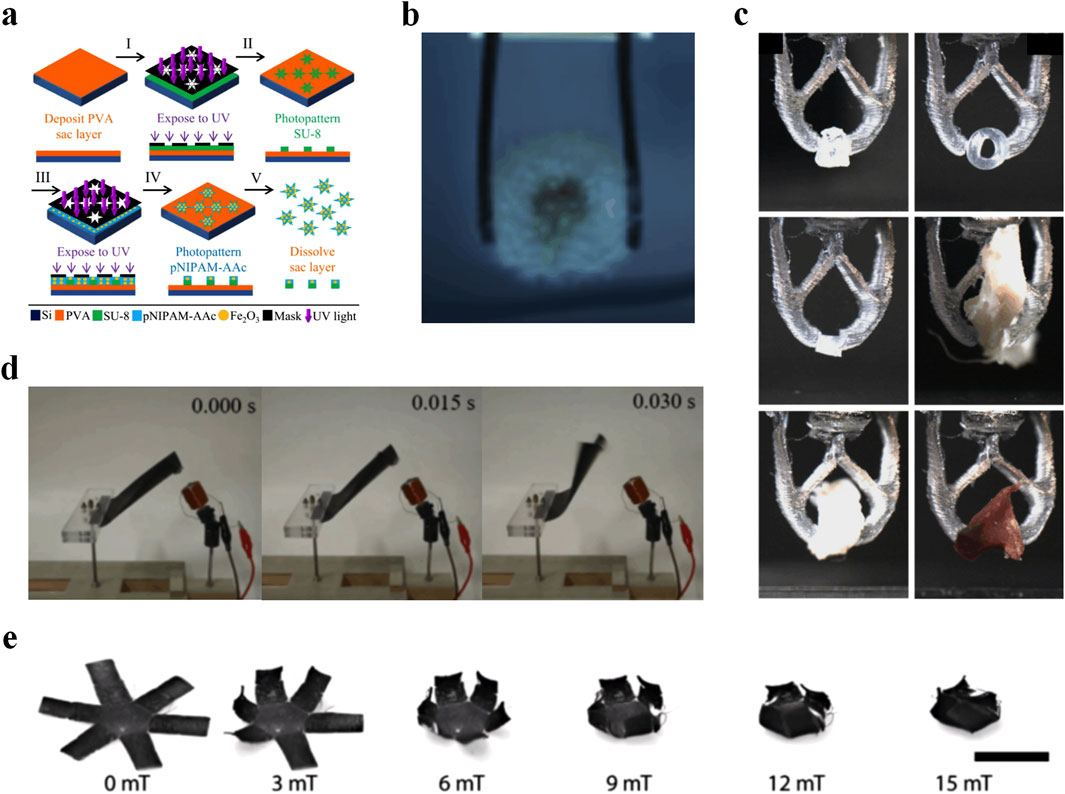
Figure 5. The structure, response effect, and application scenarios of magnetically driven soft robotic grippers. (a) Schematic of the process used to photopattern rigid nonswelling polymer SU-8 and poly N-isopropylacrylamide-acrylic acid soft grippers. Reproduced with permission from Pacchierotti et al. (2017) Copyright 2017, IEEE. (b) Soft gripper integrating porous structures into magnetic silicone elastomers. Reproduced with permission from Li et al. (2024a) Copyright 2024, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. (c) Miniaturized Variable Stiffness Gripper for Adaptive Gripping of Various Targets. Reproduced with permission from Masjosthusmann et al. (2024) Copyright 2024, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. (d) Gripping motion of one compliant finger. Reproduced with permission from Zhang Z. et al. (2019) Copyright 2019, Elsevier. (e) Close-up images of different microgrippers at various field strengths. Reproduced with permission from Xu et al. (2019) Copyright 2019, AAAS.
In scenarios involving grasping ordinary objects, precise control of the magnetic field enables multi-degree-of-freedom motion of the soft robotic gripper, including bending, rotation, and grasping actions (Zhang Z. et al., 2019; Xu et al., 2019; Miettinen et al., 2019; Yuk et al., 2016). To enhance grasping performance, researchers have introduced advancements in stiffness modulation (Li et al., 2024a; Masjosthusmann et al., 2024) and grasping techniques (Pang et al., 2020; Iwasaki et al., 2020; Kortman et al., 2024). For instance, to avoid increasing the elasticity modulus and impact force caused by adding magnetic powders to the soft gripper, a novel porous magnetic soft gripper was developed. By integrating a porous structure into a magnetic silicon elastomer, the gripper retains both high grasping force and flexibility (Li et al., 2024a). Masjosthusmann et al. (Masjosthusmann et al., 2024) proposed a miniaturized, locally driven magnetic gripper with variable stiffness, utilizing a thin planar coil (75
Magnetic-responsive soft actuators require materials with high magnetic permeability. A review (Chung et al., 2021) provides a detailed explanation from a materials engineering perspective on the composition, selection, and preparation of magnetic materials. Most existing research uses hydrogels (Tang et al., 2019) and magnetized particles in their preparation. Some studies have also created soft robots composed of pH-responsive materials and iron oxide particles (Fe3O4) via photolithography, enabling them to perform capturing and unfolding motions in a solution with changing pH and magnetic fields (Li et al., 2016). This approach offers insights into material preparation and the diversity of potential application scenarios.
However, due to the limitations of actuation methods and magnetic materials, the movement of soft grippers is constrained by the distribution and strength of the magnetic field and can be easily influenced by the surrounding environment. In addition, the design and fabrication of magnetic field-driven soft grippers often involve higher cost and technical complexity. Furthermore, magnetic field adjustment typically relies on changing the relative distance and angle between magnets and magnetic materials, which is difficult to control precisely and is slower than the current/voltage adjustments used in electromagnets.
2.5 Temperature actuation
Temperature field-driven soft robotic grippers utilize the phase transitions or physical property changes of materials under temperature variations to control their movement (Figure 6). This type of driving method is particularly useful for applications where operations need to occur at specific temperatures, such as chemical reaction control and medical fields (Gultepe et al., 2013).
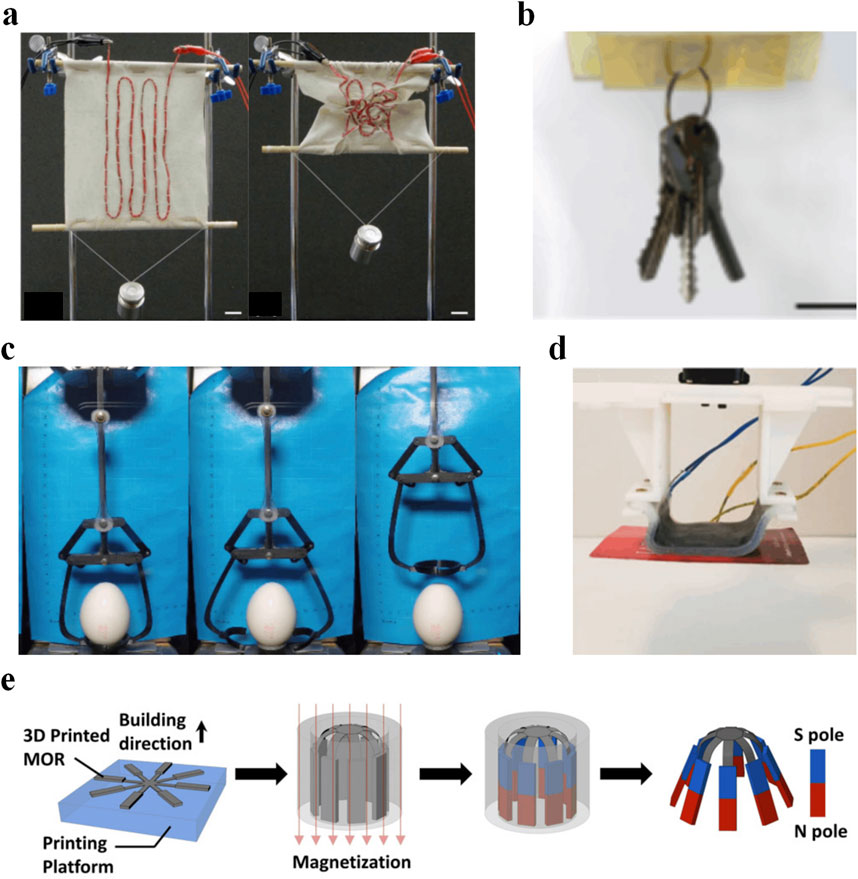
Figure 6. The structure, preparation, and application scenarios of thermally driven soft robotic grippers. (a) Active variable stiffness fabric composed of active variable stiffness fibers sewn onto inextensible muslin fabric. Reproduced with permission from Yuen et al. (2016) Copyright 2016, IEEE. (b) The embedding of objects into the SMP enables the gripping. Reproduced with permission from Linghu et al. (2020) Copyright 2020, AAAS. (c) Actuating Shape Memory Polymer for Thermoresponsive Soft Robotic Gripper. Reproduced with permission from Schönfeld et al. (2021) Copyright 2021, MDPI. (d) A novel stiffness and adhesion tuning gripper, enabled by the thermally induced phase change of a thermoplastic composite material embedded within a silicone contact pad. Reproduced with permission from Coulson et al. (2022) Copyright 2022, Mary Ann Liebert, Inc. (e) Schematic diagram of the magnetiza tion process of the magnetic octopus robot. Reproduced with permission from Feng C. et al. (2024) Copyright 2024, Mary Ann Liebert, Inc.
Commonly used driving materials include shape memory alloys (SMA) (Kim et al., 2015; Liu M. et al., 2020; Lee et al., 2019a) and shape memory polymers (SMP) (Linghu et al., 2020; Toyoda et al., 2024; Schönfeld et al., 2021). In the field of SMA applications, a wrist actuator that can withstand cantilever loads and achieve torsional movement was developed (Rodrigue et al., 2017a). To overcome the stiffness limitations of SMA, several enhancement schemes have been proposed. Kim et al. (2015) created a lightweight system weighing only 2.9 g but capable of bearing over 2.7 kg by embedding SMA actuators into a tubular origami structure. On the other hand, researchers discovered the unique adhesive properties of SMP, which can expand grasping paradigms (Son et al., 2023). Although non-traditional adhesion/adhesion-based gripping (such as the adhesive film scheme in (Toyoda et al., 2024)) performs excellently in flat object manipulation, its adaptability to multi-scale irregularly shaped objects is still limited. To address this flaw, an innovative solution was proposed, embedding the target object into a soft SMP and then triggering hard-state locking to achieve reliable gripping, while utilizing the SMP shape memory effect for damage-free release (Linghu et al., 2020).
In addition to these two materials, thermoresponsive hydrogels (Zheng et al., 2018; Zheng et al., 2015; Chen et al., 2024), liquid crystal elastomers (Kim et al., 2021; Zhang et al., 2023), thermoplastic elastomers (Coulson et al., 2022), and low-melting-point metals (Wang et al., 2021) can also undergo deformation under temperature changes to drive soft grippers. For example, Liu et al. (Liu H. et al., 2024) innovatively introduced a hydrophilicity difference strategy, endowing hydrogels with ultra-fast thermal response capabilities (21°/s) and excellent photothermal conversion efficiency (3.7 °C/s), opening new avenues for the design of fast actuators. An intelligent polymer hydrogel with an anisotropic structure was developed, whose bionic motion characteristics offer new possibilities for finger muscle rehabilitation training and may assist in the recovery of motor functions in patients with hand injuries (Wu B. et al., 2022). In liquid crystal elastomer research, scholars used a salt-template method to fabricate rod-shaped foam fixtures (Zhang et al., 2023). Under the influence of temperature fields, the thickness of this material can reduce by 77%, the shrinkage along the alignment direction can reach 57%, and it can achieve a reversible bending of 93°, demonstrating excellent mechanical properties and shape memory characteristics.
In summary, SMAs and SMPs are widely used in soft grippers due to their fast response and large deformation capabilities. Furthermore, heat, electricity, and magnetism can interact and convert through various physical effects. For example, electrothermal polymers deform due to heat from an electric field, and the magnetization of certain materials changes with temperature, assisting temperature responsiveness. These concepts provide new approaches for temperature field-driven soft robots.
However, it is worth noting that grippers made from metals or chemicals may transfer heat or adsorb contaminants during operation, potentially leaving residues or causing cross-contamination. As a result, such soft grippers may pose risks in direct interaction with objects, and future research should focus on optimizing these aspects.
2.6 Other actuation methods
The actuation methods for soft robotic grippers are diverse. In addition to the common electric, magnetic, and fluid pressure-driven methods, other physical fields, such as optical, chemical, and acoustic fields, can also be utilized for actuation. While there are fewer studies on these alternatives, this chapter provides a brief overview and explores potential application scenarios.
Optical field-driven soft grippers rely on photosensitive materials (Jin et al., 2018; Yang et al., 2017), such as photoreactive polymers or liquid crystal elastomers (LCE), which deform under light exposure. For example, researchers (Huang et al., 2016) have mimicked the pinching motion of the thumb and index finger, creating a remote light-driven microgripper capable of manipulating and assembling microscale objects both in air and underwater. This actuation method offers a non-invasive approach that enables remote operation. Optical field-driven soft grippers can also be used in environmental monitoring and chemical analysis, where they control sample collection and processing based on light signals.
Chemical field-driven soft grippers utilize materials sensitive to specific chemicals, such as pH-responsive hydrogels, to deform in response to chemical substances. In the medical field, these grippers could serve as part of a drug delivery system, where they control the release of drugs based on the changes in the body’s chemical composition, such as pH variations. In underwater operations, these grippers can be employed to collect or release specific chemicals, influencing the aquatic environment or conducting underwater experiments.
Acoustic field-driven soft grippers use sound wave energy, such as ultrasound or infrasonic waves, for actuation. In minimally invasive surgeries, acoustic field-driven soft grippers can be precisely controlled using ultrasound, minimizing damage to the patient’s body, especially in delicate procedures (Zhou Y. et al., 2021). Given that sound waves can propagate effectively underwater, acoustic field-driven soft grippers are also well-suited for underwater exploration, salvage operations, and seabed resource development.
These driving methods provide more options and possibilities for the design and application of soft grippers, enabling soft robots to better adapt to various working environments and task requirements. As materials science and control technologies continue to evolve, new driving methods may emerge, further expanding the functionality and application scope of soft robots.
2.7 Summary
After reviewing the theoretical principles and current progress of different driving modes, it is necessary to provide a systematic comparison of their key performance indicators. Table 1 summarizes the characteristics of representative actuators in terms of output force, strain range, response speed, and application scenarios, along with relevant references. This allows readers to gain a clearer understanding of the advantages and suitable application directions of each actuator type.
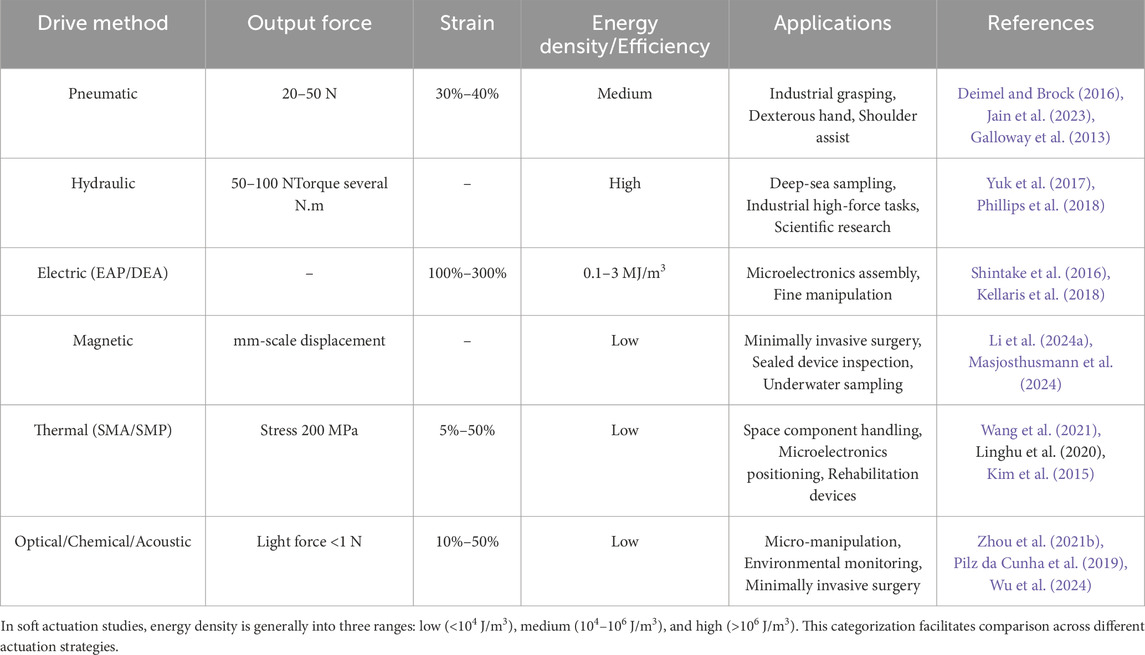
Table 1. Quantitative analysis and applications of soft grippers with different actuation mode.
3 Materials
Soft grippers, as the name suggests, are grippers made from soft materials. In engineering, “soft” and “hard” are typically considered relative concepts. In this chapter, we adopt the definition from (Rus and Tolley, 2015), where materials with a Young’s modulus below
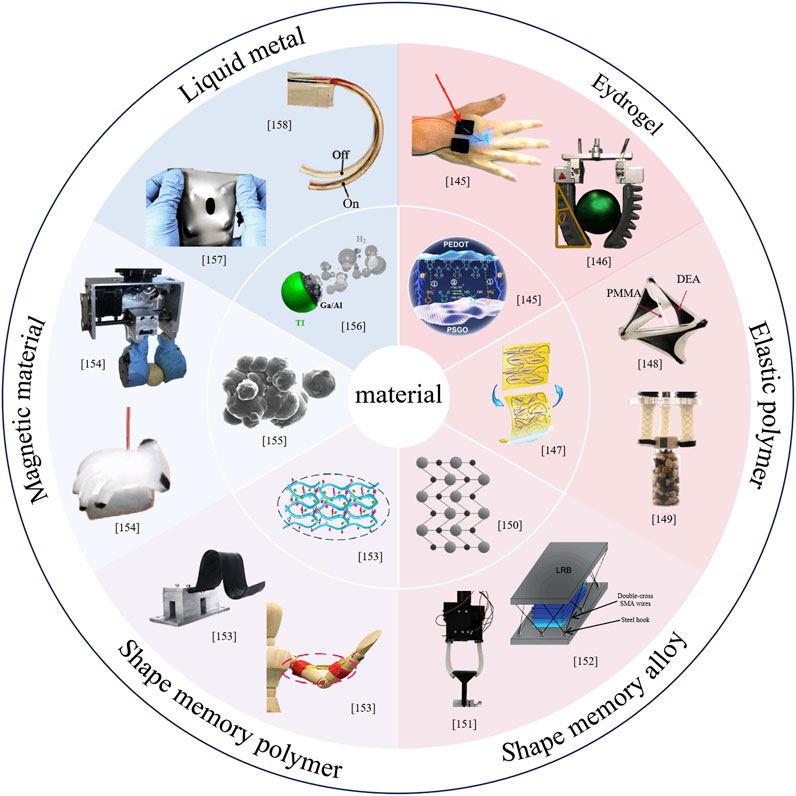
Figure 7. Microscopic schematics and macroscopic application diagrams of soft grippers with different materials Redox-Active Nanosheets Incorporated Hydrogels, the hydrogel adhered to the author’s hand, which was connected to a circuit and illuminated an LED. Reproduced with permission from Gan et al. (2020) Copyright 2020, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. Two-finger pneumatic soft grippers. Reproduced with permission from Qu et al. (2023) Copyright 2023, Elsevier. The humidity-responsive principle of the bending of the actuators. Reproduced with permission from Liu Y. et al. (2017) Copyright 2017, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. DEA-tensegrities. Reproduced with permission from Watanabe et al. (2023) Copyright 2023, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. Soft gripper twisting the cap of a vial. Reproduced with permission from He et al. (2019) Copyright 2019, American Association for the Advancement of Science (AAAS). Crystal orientation of shape memory alloy. Reproduced with permission from Tabrizikahou et al. (2021) Copyright 2021, MDPI. The gripper was installed as the end-effector of a robotic arm. Reproduced with permission from Lee et al. (2019b) Copyright 2019, Nature Publishing Group. SMA wire-based lead rubber bearing. Reproduced with permission from Hedayati Dezfuli and Alam (2018) Copyright 2018, Taylor & Francis. Shape memory mechanism, deformable shape memory epoxy resin is used for artificial muscles, shape memory alloy actuator. Reproduced with permission from Luo et al. (2024) Copyright 2024, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. MR fluid Gripper, MAE gripper. Reproduced with permission from Xu et al. (2024) Copyright 2024, MDPI. Ferromagnetic particles in MRE. Reproduced with permission from Ran et al. (1999) Copyright 1999, Springer. A water-driven hydrogenpropelled Al Ga/Ti micromotor. Reproduced with permission from Gao et al. (2012) Copyright 2012, American Chemical Society. Thermally conductive but insulated LM-polymer composites. Reproduced with permission from Bartlett et al. (2017) Copyright 2017, National Academy of Sciences. One actuation cycle of dielectric elastomer actuator (DEAs) with unfilled elastomer. Reproduced with permission from Chen S. et al. (2020) Copyright 2020, Cell Press.
3.1 Hydrogel
The origin of hydrogels can be traced back to ancient civilizations, where people used naturally derived gel-like substances for basic medical and food preservation purposes. The modern concept of hydrogels, however, stems from the rapid development of polymer science in the early 20th century, driven by advances in synthetic polymer chemistry (Buwalda et al., 2014).
Hydrogel is a polymer material with a three-dimensional network structure capable of absorbing and retaining a significant amount of water (Peppas and Khare, 1993). Due to its exceptional properties, including high stretchability, transparency, ionic conductivity, and biocompatibility, hydrogel holds promise as a compliant material for soft robots (Lee et al., 2020). This material is typically composed of hydrophilic polymers, which can form hydrogen bonds with water molecules and exhibit the ability to absorb and retain moisture. This property allows actuators to achieve directed transfer of water molecules within (Zheng et al., 2018; Gao et al., 2017; Zheng et al., 2015) (Figures 8a,d). By polymerizing hydrophilic polymers with borax, researchers have created materials with moisture-absorbing and thermal shrinkage functions (Gao et al., 2017) (Figure 8b), enabling responses to humidity, temperature, and infrared light. Physical crosslinking, such as hydrogen bonding, relies on reversible non-covalent interactions (Hennink and van Nostrum, 2012), which can be adjusted by external conditions like temperature, solvent, and pH. In contrast, chemical crosslinking via covalent bonds (Duan et al., 2017) provides heat and chemical resistance, enhancing material stability.
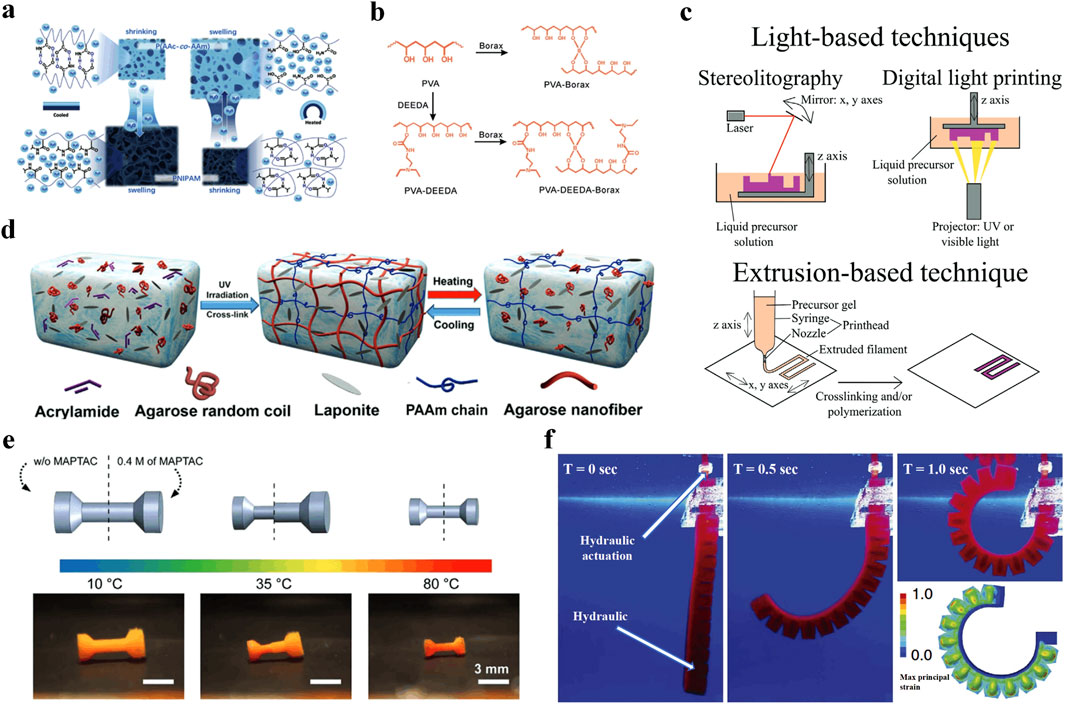
Figure 8. Molecular structure, preparation methods, and physical images of hydrogel. (a) Mimosa inspired bilayer hydrogel actuator: at low temperature (15 °C), the PNIPAM layer is swollen by water, Increasing temperature to 40 °C leads to a shrinking of the PNIPAM layer. Reproduced with permission from Zheng et al. (2018) Copyright 2018, Royal Society of Chemistry. (b) Schematic structure of PVA, PVA–borax, PVA–DEEDA, and PVA–DEEDA–borax, and their responsive properties. Reproduced with permission from Gao et al. (2017) Copyright 2017, Royal Society of Chemistry. (c) Light-based and extrusion-based printing techniques used in 4D printing of hydrogels. Reproduced with permission from Champeau et al. (2020) Copyright 2020, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. (d) The network formation and transformations of 4D ink consisted of agarose, PAM, and Laponite. Reproduced with permission from Guo et al. (2018) Copyright 2018, American Chemical Society. (e) 3D printed PNIPAAm micro-structures and their programmed temperature dependent deformation. Reproduced with permission from Han et al. (2018) Copyright 2018, Springer Nature. (f) Fast hydraulic actuation (actuation frequency = 1 Hz). Reproduced with permission from Yuk et al. (2017) Copyright 2017, Springer Nature.
To improve the performance of hydrogels, researchers have not only optimized their mechanical properties through crosslinking strategies, but also achieved tough, transparent, and conductive integration of hydrogels with materials such as glass, ceramics, silicon wafers, aluminum, and titanium, significantly enhancing mechanical strength (Yuk et al., 2016). To improve the toughness of hydrogels, various reinforcement methods have been systematically summarized (Sun et al., 2012; Liu X. et al., 2017), providing theoretical guidance for material design. At the same time, the introduction of 3D printing (Han et al., 2018) (Figure 8e) and 4D printing technology (Champeau et al., 2020) (Figure 8c) has opened new directions for the manufacture of complex hydrogel structures and dynamic functional regulation. Thanks to its unique molecular structure, hydrogel exhibits excellent self-healing abilities (Li et al., 2015; Qin et al., 2019). For instance, (Qin et al., 2019) introduced dynamic thiol-silver (RS-Ag) interactions as a healing motif, achieving efficient self-repair through the reversible breakage and reassembly of dynamic bonds. Additionally, smart materials with optical and acoustic camouflage functions have been developed by leveraging the similarity between hydrogel and water, thereby expanding their application scenarios in soft grippers (Yuk et al., 2017) (Figure 8f).
Different preparation methods, including adjusting the composition and crosslinking density of polymers, can control the elasticity, toughness, and strength of hydrogels, broadening their application range. For instance, cartilage-inspired hydrogel strain sensors have been developed for human motion monitoring with ultrahigh toughness and fatigue resistance (Zhang W. et al., 2019); injectable zwitterionic hydrogels have enabled the fabrication of highly stretchable and adhesive wearable sensors (Liu et al., 2023b); bioinspired conductive hydrogels with stable anti-swelling properties have been proposed for articular cartilage replacement (Zhang S. et al., 2021); and tough hydrogels have also been applied in biomedical devices, tissue engineering, and soft robotics (Sun et al., 2019). However, hydrogels generally have lower mechanical strength, which limits their use in high-load or high-pressure applications. Moreover, preventing water evaporation from the gel and reducing its sensitivity to temperature and humidity fluctuations, remain unresolved challenges.
3.2 Elastic polymers
Elastic polymers are a class of polymer materials with high elasticity and flexibility, capable of returning to their original shape after being subjected to external forces (Figure 9). These materials are highly suitable for the fabrication of soft grippers, as they can provide the necessary compliance and gripping capability. Below are some commonly used elastic polymer materials and their characteristics.
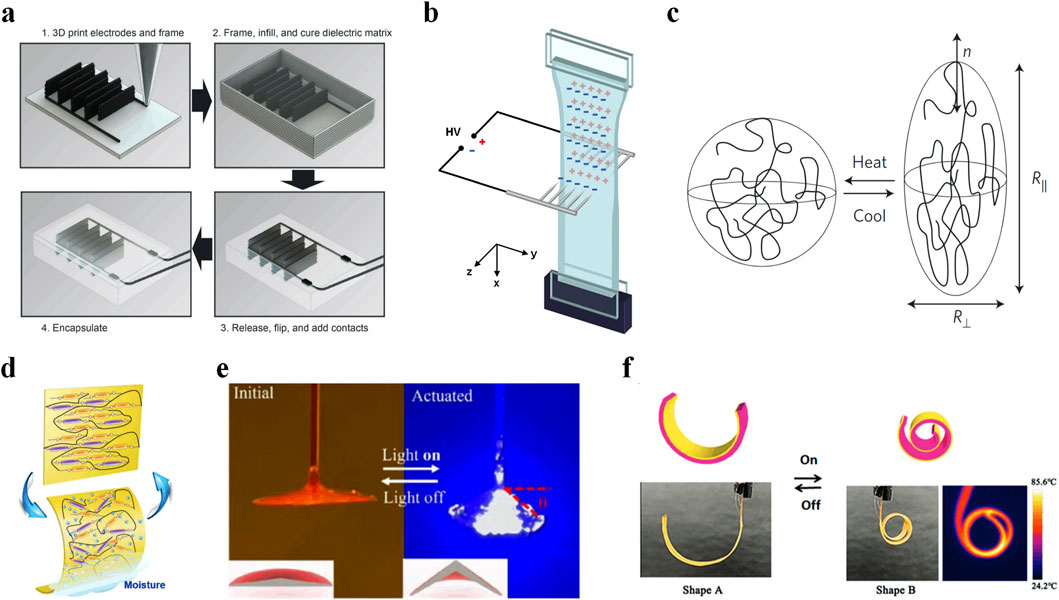
Figure 9. Molecular structure, preparation methods, and physical images of elastic polymers. (a) The fabrication process for printing DEAs with high aspect ratio, interdigitated electrodes followed by dielectric matrix infilling. Reproduced with permission from Chortos et al. (2020) Copyright 2020, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. (b) Electrode-less actuation of a dielectric elastomer. Reproduced with permission from Keplinger et al. (2010) Copyright 2010, National Academy of Sciences. (c) Thermomechanical actuation in liquid crystal elastomers. Reproduced with permission from White and Broer (2015) Copyright 2015, Nature Publishing Group. (d) The humidity-responsive principle of the bending of the actuators. Reproduced with permission from Liu Y. et al. (2017) Copyright 2017, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. (e) Controlling suction cup-based gripper deformation direction by manipulating film cross section. Reproduced with permission from Lyu et al. (2022) Copyright 2022, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. (f) The bending states of the ELCN actuator driven by a 0.655 W electric power for 5 s and after turning off the electric power for 15 s. Reproduced with permission from Xiao et al. (2019) Copyright 2019, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim.
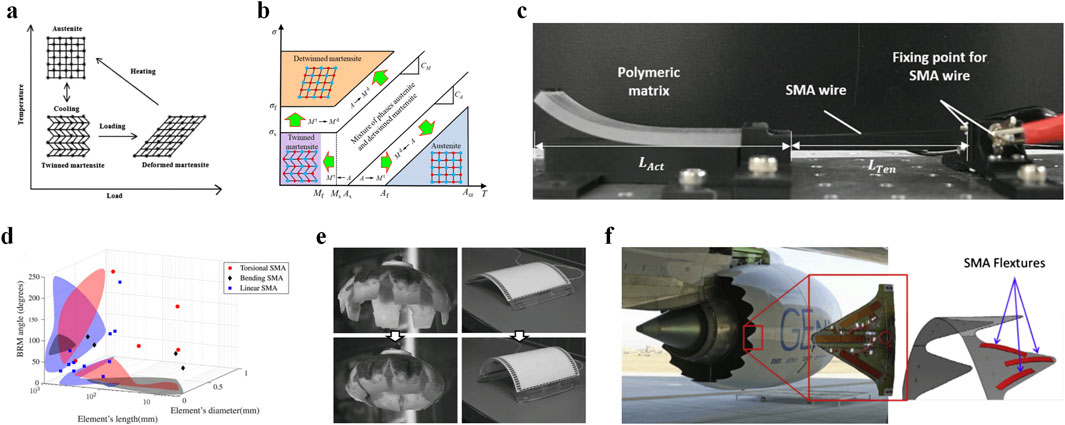
Figure 10. Molecular structure, preparation methods, physical images, and application scenarios of shape memory alloy. (a) Shape memory effect. Reproduced with permission from Sharma et al. (2018) Copyright 2018, SAGE Publications. (b) Phase transition and crystal structure of SMA. Reproduced with permission from Fan et al. (2023) Copyright 2023, Elsevier. (c) Fixing point and length dimensions of the long shape memory alloy tendon-based soft robotic actuators. Reproduced with permission from Lee et al. (2019b) Copyright 2019, Nature Publishing Group. (d) Bidirectional rotational motion of SMA-Based actuators: the relationship between element dimensions and actuator’s bidirectional motion range. Reproduced with permission from Hu et al. (2021) Copyright 2021, Frontiers Media. (e) Biomimetic soft robot inspired from jellyfish and inchworm. Reproduced with permission from Rodrigue et al. (2017b) Copyright 2017, Mary Ann Liebert, Inc. (f) Application of SMA in Boeing’s variable geometry chevron. Reproduced with permission from Jani et al. (2014) Copyright 2014, Elsevier.
3.2.1 Dielectric elastomers (DEs)
Dielectric elastomers (DEs) are electroactive polymer materials that undergo significant deformation under the influence of an external electric field. Due to their large driving strain, fast response, and high energy density, DEs are considered ideal candidates for artificial muscle technologies (Keplinger et al., 2010). Typically, dielectric elastomer materials consist of a soft polymer membrane and two stretchable electrodes, one on each side. When an electric field is applied between the electrodes, Maxwell stresses generated by the electrostatic interaction cause the elastomer membrane to deform. However, the high driving voltage and pre-stretching characteristics of DEs severely limit their safety, durability, and flexibility (Ma and Sameoto, 2022). To address this challenge, the driving force and displacement output have been enhanced by using low-density, ultra-thin carbon nanotube electrodes (Duduta et al., 2019). Additionally, reducing the DE film thickness, lowering stiffness, and increasing the dielectric constant can systematically optimize driving performance (Romasanta et al., 2015). In terms of fabrication techniques, the limitations of traditional spin-coating (Lotz et al., 2011) and spraying (Araromi et al., 2011) methods have been overcome by innovatively introducing 3D printing technology (Cai, 2016; Chortos et al., 2021; Haghiashtiani et al., 2018), enabling the precise manufacturing of complex structures. A more advanced approach is 4D printing, which introduces the time dimension to 3D printing, enabling structures to change shape and function in response to external stimuli (e.g., heat, light, electric, or magnetic fields). Exploratory studies on dielectric elastomer fibers highlight their 4D printing potential, offering a theoretical basis for future research (Cai, 2016).
3.2.2 Liquid crystal elastomers (LCEs)
In the 1980s, the potential applications of liquid crystal materials began to be explored. Unlike dielectric elastomers, LCEs respond mainly to changes in the liquid crystal phase, where the alignment of liquid crystal molecules changes under external stimuli, resulting in complex shape deformations (Lyu et al., 2022; Xiao et al., 2019; Seo et al., 2024). Liquid crystal elastomers combine the ordered nature of liquid crystals with the flexibility of elastomers. Their rapid response to stimuli, anisotropic deformation, and shape changes induced by ordered-disordered phase transitions make them excellent candidates for soft robotics (Xiao et al., 2020). Compared to dielectric elastomers (DEs), liquid crystal elastomers (LCEs) are more sensitive to environmental conditions, such as temperature (White and Broer, 2015), light (Da Cunha et al., 2020), and electric fields (Zhang et al., 2024; Fowler et al., 2021), giving them a unique advantage in multifunctional applications. Thanks to the optical properties of the liquid crystal phase, LCEs possess optical scattering and birefringence capabilities, making them suitable for integrating optical sensors to monitor interactions between the gripper and its environment (e.g., contact force and deformation).
Overall, dielectric elastomers (DEs) and liquid crystal elastomers (LCEs), as emerging intelligent materials, have shown significant potential for applications in the field of soft robotics. DEs are frequently employed in biomimetic artificial muscles (Li et al., 2024b), flexible actuators (Liu Y. et al., 2025), and walking robots (Feng W. et al., 2024), owing to their fast response speed, high strain capability, and intrinsic self-sensing properties. In addition, DE-based soft grippers demonstrate excellent adaptability in grasping irregular objects and interacting with complex environments (Youn et al., 2024). Nevertheless, challenges such as the requirement for high-voltage activation, risks of dielectric breakdown, and limited long-term material stability remain key barriers to their broader engineering implementation. In contrast, LCEs combine the anisotropic ordering of liquid crystals with elastomeric deformability, enabling actuation modes such as bending, contraction, and twisting under light, heat, or electric fields. However, their relatively slow response, difficulties in alignment control, and limited output force continue to restrict practical use in robotics (Xiao et al., 2020). Future optimization of LCE performance may include mixed rigid-flexible component structures (Wang Z. et al., 2019), internal active cooling mechanisms (He et al., 2020), and improving effective contact and friction between grippers and objects (Lu et al., 2017).
3.2.3 Other materials
In addition to dielectric elastomers and liquid crystal elastomers, other types of elastic polymer materials can also be soft grippers. Polydimethylsiloxane (PDMS) is a silicon-based polymer known for its transparency, flexibility, good optical properties, and biocompatibility (Wolf et al., 2018). PDMS materials exhibit ideal viscoelastic behavior, making them suitable for grasping, transporting, and assembling fabrics and thermoplastic composites. Çakmak et al. (2020) proposed an empirical model based on linear viscoelastic theory and linear elastic fracture mechanics to describe the peel velocity-dependent adhesion characteristics of the gripper, enabling the prediction of the critical energy release rate at different peel velocities. Furthermore, various elastomeric materials show application potential, such as polyacrylate (Kofod et al., 2003), thermoplastic elastomers (TPE) (Spontak and Patel, 2000; Holden, 2024), and SEBS (styrene-ethylene-butylene-styrene block copolymer) (Su, 2002; Ishak et al., 2008), all of which have good elasticity and flexibility, making them suitable for soft gripper fabrication.
3.3 Shape memory alloy (SMA)
In 1932, Swedish scientist Arne Olander first observed that some metal alloys could return to their original shape when heated, marking the discovery of shape memory alloys (SMAs) (Qu et al., 2022). Subsequently, scientists revealed the microscopic mechanisms of SMAs (Allafi et al., 2002; Zanotti et al., 2012), laying the foundation for engineering applications. Depending on the alloy type, SMAs are primarily classified into three categories: nickel-titanium-based shape memory alloys (Ni-Ti SMA), copper-based shape memory alloys (Cu-SMA), and iron-based shape memory alloys (Fe SMA) (Figure 10).
The B2 (austenite) to B19’ (martensite) phase transformation in NiTi SMAs achieves excellent shape memory effects through lattice shear, making NiTi one of the most widely used SMA materials. Particularly, porous NiTi structures have garnered attention for their low elastic modulus, which allows for high inward growth and proliferation of bone tissue, making it highly favored for medical applications (Sharma et al., 2018). Additionally, due to its outstanding biocompatibility (Bogdanski et al., 2002) and shape memory characteristics, Ni-Ti SMA is used to manufacture medical devices such as vascular stents, heart valves, and dental braces, effectively supporting and repairing damaged tissue structures. The high toughness (Fan et al., 2023), superelasticity (Fang et al., 2015), and excellent mechanical properties (Florian et al., 2020) of Ni-Ti SMA have also attracted the attention of researchers, leading to its widespread use in aerospace, construction engineering, and other fields. Apart from Ni-Ti SMA, Cu-SMA has also attracted significant attention, and its cost is only one-tenth that of Ni-Ti SMA, making it commercially attractive (Dasgupta, 2014). However, Cu-SMA can only recover up to about 4% strain (vs 8% for Ni-Ti alloys) and has lower tensile strength, fatigue life, and chemical stability. Its oxidation rate in humid environments is 3–5 times higher than Ni-Ti, limiting its application. Fe-SMAs mainly include Fe-Pt, Fe-Ni-Co, Fe-Mn-Si, and stainless-steel series. Review studies (Algamal et al., 2024) have discussed the preparation methods of Fe SMA and the trend of 4D printing. Fe SMA (Sun et al., 2024a; Sun et al., 2024b; Sun et al., 2025) also boasts high strength, good ductility, moderate strength-to-weight ratio, and excellent low-cycle fatigue performance, making it highly applicable in aerospace. As early as 1969, Fe SMA tube joints were successfully applied to the fuel pipeline of US fighter jets (Liu et al., 1995). Fe SMA is also used in the manufacturing of adaptive wings, rock splitters for space exploration, and more.
With the rise of smart materials and systems concepts, SMAs have been used in the development of smart structures and systems, such as adaptive structures and robotics (Rodrigue et al., 2017a). SMAs also provide a biomimetic design foundation for soft grippers, as they can simulate the continuous deformation of soft-bodied animals, reducing the need for precise control (Rodrigue et al., 2017b). Therefore, soft actuators based on SMA wires have been used to develop biomimetic robots such as caterpillars (Koh and Cho, 2012), jellyfish (Villanueva et al., 2011), octopuses (Cianchetti et al., 2015), starfish (Mao et al., 2014), and rolling caterpillars (Lin et al., 2011). Beyond laboratory prototypes, SMA-driven soft grippers have been applied in industrial automation for tasks such as high-precision assembly and handling of fragile components, as well as in minimally invasive medical devices for vascular intervention and tissue manipulation, demonstrating their strong potential to advance the next-generation of practical soft robotic grippers (Lee et al., 2019b). Although SMAs offer advantages like high power density (up to
3.4 Shape memory polymer (SMP)
Shape memory polymers (SMPs) are polymers with tailored molecular structures (Figure 11), such as cross-linked networks or biphasic systems, enabling reversible phase transitions and shape recovery under external stimuli (Linghu et al., 2024). The two-phase model proposed in the 1980s, consisting of a fixed and a reversible phase, laid the foundation for SMP design (Hu et al., 2012). The thermodynamic principles of thermally induced shape memory effects were later clarified, establishing the molecular-level structure–performance relationship as a theoretical basis for macroscopic cooperative behavior (Lendlein and Kelch, 2002).
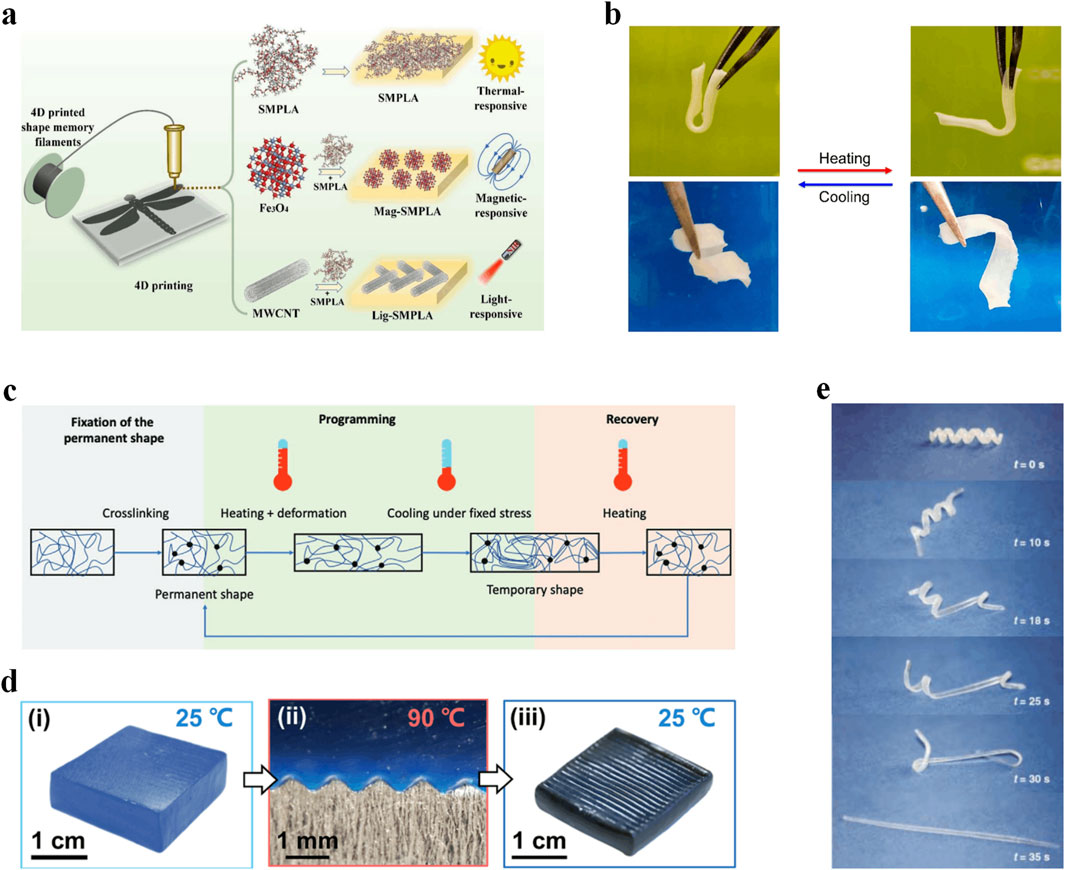
Figure 11. Molecular structure, preparation methods, and physical images of shape memory polymer. (a) Thermal-, magnetic-, and light-responsive 4D printed SMPLA filaments. Reproduced with permission from Lin et al. (2024) Copyright 2024, Elsevier. (b) The reversible shape memory behavior of polymer in water bath set at 10 °C and 60 °C. Reproduced with permission from Wang et al. (2017) Copyright 2017, American Chemical Society. (c) The mode of action of photoresponsive shape-memory polymers. Reproduced with permission from Delaey et al. (2020) Copyright 2020, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. (d) Demonstration of SMP shape locking effect (i,iii) and its interface image in contact with steel substrate (ii). Reproduced with permission from Linghu et al. (2023) Copyright 2023, National Academy of Sciences. (e) Transition from the temporary shape (spiral) to the permanent shape (rod) for a shape-memory network. Reproduced with permission from Lendlein and Kelch (2002) Copyright 2002, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim.
In recent years, significant progress has been made with the new generation of SMPs based on molecular dynamic structural regulation. Reversible covalent bonds (e.g., Diels–Alder reactions) and strong physical interactions (e.g., hydrogen bonds or metal coordination) have been introduced, and multimodal response systems driven by light (Chen Y. et al., 2020; Fang et al., 2017), chemicals (Aoki et al., 2007), humidity (Chen et al., 2009), magnets (Lin et al., 2024; Ze et al., 2020), electricity (Lu et al., 2010; Lu et al., 2015), and water molecules have been successfully developed, representing a leap from single thermal stimulation to a cooperative multi-physical field response.
SMP molecular chains are in a glassy state below the glass transition temperature (Tg), showing rigidity, while above Tg, they enter a rubbery state and exhibit flexibility. By adjusting the polymer composition and cross-link density, Tg can be altered, allowing for stiffness modulation. Moreover, by combining SMPs with other materials, such as nanoparticles or fibers, composites with tunable stiffness can be created, enhancing driving force in soft grippers (Wang and Ahn, 2017; Son et al., 2023; Yang et al., 2016). Additionally, SMPs can achieve strains up to 600%, far exceeding other shape memory materials. This property enables large-scale deformation in soft grippers, allowing adaptation to diverse objects (Yang Y. et al., 2023). The enhancement of adhesion strength and switchability in SMPs by adjusting stiffness, shape locking, and shape memory effects has also been summarized (Linghu et al., 2024). Innovative SMP-based dry adhesion designs, such as microstructured surfaces and embedded adaptive adhesives, provide new directions for gripper mechanisms.
Shape memory polymers (SMPs), owing to their unique shape memory effect (Guo et al., 2025), excellent programmability, and multifunctional characteristics (Linghu et al., 2025), have become key functional materials in the field of intelligent robotics. Studies have shown that SMPs exhibit remarkable deformation and actuation capabilities in multistable structures, enabling reversible transitions between multiple stable configurations–offering new design strategies for robots requiring complex shape transformations (Chi et al., 2022). Notably, with the integration of 3D/4D printing technologies and multi-stimuli responsive mechanisms, SMPs have achieved significant breakthroughs in soft gripper applications, including: (1) enabling delicate and non-invasive manipulation (Qing et al., 2024); and (2) development of multi-field responsive systems, such as those triggered by temperature, light, and magnetic fields (Wang Y. et al., 2024). These advancements are propelling soft robotics toward greater efficiency, adaptability, and dexterity.
3.5 Magnetic materials
As early as 2500 BCE, natural magnets (
Permanent magnets have been employed in a wide range of applications within the field of soft robotics, including localization systems (Liu and Wang, 2024) and flexible grippers (Zhang J. et al., 2021). Due to their ability to sustain a magnetic field without the need for continuous power input, they present promising design opportunities for implementing passive adhesion and self-locking functionalities in soft grippers.
Soft magnetic materials, which have low coercivity and high magnetic permeability, are easily magnetized and demagnetized. They are primarily used for magnetic conduction and the conversion and transmission of electromagnetic energy. In soft gripper applications, the low coercivity and high magnetic permeability of soft magnetic materials enable quick response to changes in external magnetic fields, allowing for rapid grasping and releasing actions, as shown in Figure 12. A review (Kim and Zhao, 2022) notes that for magnetic soft devices and robots with many degrees of freedom and complex, continuous shape changes, traditional control methods based on sensory feedback can be challenging. Future research may focus on optimizing motion performance with limited experimental data and developing more robust control strategies for magnetic soft robots.
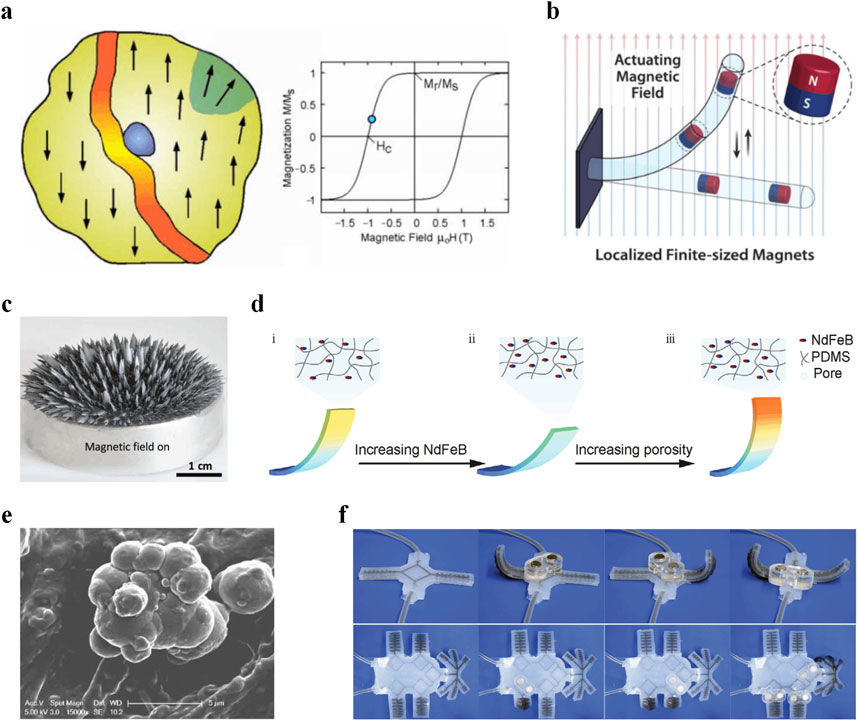
Figure 12. Molecular structure, preparation methods, physical images, and working principle of magnetic materials. (a) Magnetization reversal: nucleation and pinning as typical reversal mechanisms (left), hysteresis loop (right). Reproduced with permission from Skomski et al. (2013) Copyright 2013, IEEE. (b) Discrete form of magnetic soft materials: Magnetic components adopt the form of finite size magnets embedded in flexible structures. Reproduced with permission from Kim and Zhao (2022) Copyright 2022, American Chemical Society. (c) Macroscopic state of MRF in the presence of a magnetic field. Reproduced with permission from Carlson and Jolly (2000) Copyright 2022, American Chemical Society. (d) Preparation process of Porous Magnetic Soft Grippers.Reproduced with permission from Li et al. (2024a) Copyright 2024, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. (e) Ferromagnetic particles in MRE. Reproduced with permission from Ran et al. (1999) Copyright 1999, Springer. (f) A magneto rheological fluid valve that uses a magnetic field to control the pressure inside a continuous flow fluid actuator. Reproduced with permission from McDonald et al. (2020) Copyright 2020, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim.
In addition, in the past decade, significant advancements have been made in the synthesis of magnetic nanoparticles (Stiufiuc and Stiufiuc, 2024), granting them specific properties such as size, shape, magnetic characteristics, and stability. For instance, in the study mentioned in reference (Li et al., 2024a), magnetic nanoparticles were dispersed in silicone to form magnetic silicone composites, which can deform under the influence of an external magnetic field, enabling object grasping functionality.
3.6 Liquid metal
The study of liquid metals began in 1938, when Kramen and colleagues produced amorphous metal films via evaporative deposition, demonstrating their unique behavior. Today, liquid metals are generally defined as room-temperature alloys with high conductivity and fluidity (Figure 13), which enable applications in flexible electronics and soft robotics (Yang N. et al., 2023).
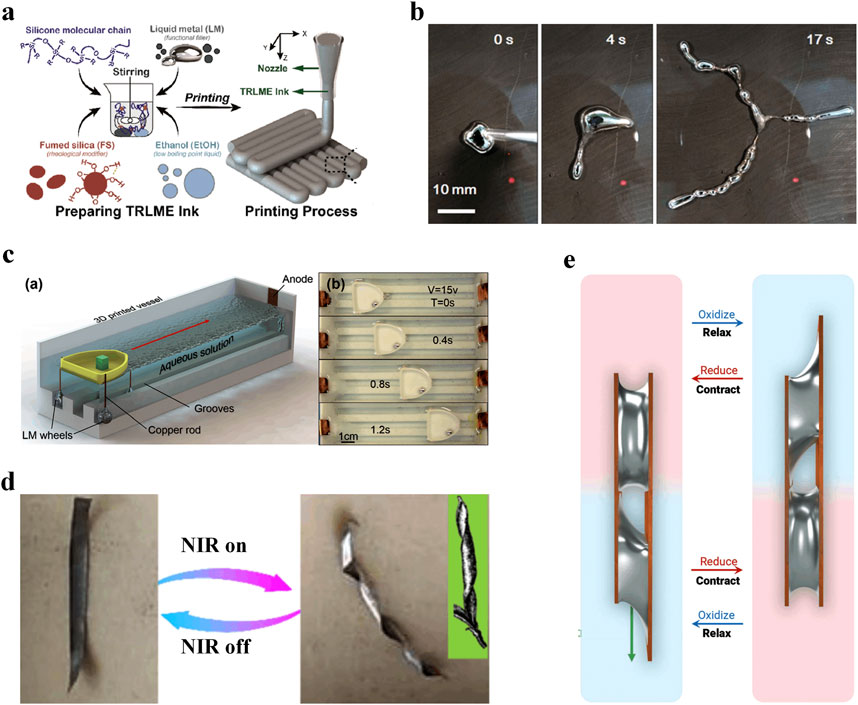
Figure 13. Preparation methods, physical images, and working principle of liquid metal. (a) 4D printing of high-performance thermal-responsive liquid metal elastomers. Reproduced with permission from Zhou et al. (2020) Copyright 2020, American Chemical Society. (b) The surface tension variations across the liquid metal droplet through its simultaneous electrochemical interactions with aluminum and graphite in the NaOH electrolyte.Reproduced with permission from Hu et al. (2017) Copyright 2017, Springer Nature. (c) Boat-like liquid metal vehicle running on railway. Reproduced with permission from Yao and Liu (2016) Copyright 2016, Royal Society of Chemistry. (d) Photo-driven self-twisting. Reproduced with permission from Li X. et al. (2019) Copyright 2019, Springer Nature. (e) Liquid metal actuators can be paired antagonistically by prestretching one side of a pair of actuators and oxidizing the two actuators alternately. Reproduced with permission from Liao and Majidi (2022) Copyright 2022, Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim.
In terms of physical properties, liquid metals possess both high fluidity and high surface tension at room temperature. The surface tension of liquid metals can be precisely controlled through chemical reactions or voltage differences, providing the foundation for autonomous motion and intelligent deformation (Ma et al., 2025). Based on this theory, the multi-deformation phenomenon of liquid metals (Sheng et al., 2014) and the self-driven soft robot effect (Zhang et al., 2015) were first revealed. Chemically, the reactivity of liquid metals allows them to react with acids, bases, and salts under mild conditions. Surface oxidation/reduction reactions can drive their autonomous movement. Inspired by this, various bio-inspired behaviors, such as liquid metal amoeba-like deformation (Hu et al., 2017) and breathing energy harvesting phenomena (Yi et al., 2016), have been discovered. Over the past 2 decades, significant progress has been made in developing liquid metal-based smart materials for soft robots (Chen et al., 2023). However, single liquid metals alone are not sufficient to demonstrate intelligent properties. Therefore, most current studies focus on composite systems made up of liquid metals and synergistic substances such as solutions, particles, and polymers. Liquid metals also possess good biocompatibility and can be easily modified by organic compounds, carbon-based materials, etc., making them suitable for biomedical applications.
In the field of liquid metal composite materials innovation, biocompatible Fe3O4 magnetic nanoparticles have been successfully embedded into eutectic gallium-indium alloy (EGaIn) using a reaction-wetting mechanism, resulting in the development of liquid metal micro soft robots with excellent magnetic stability (Shen et al., 2023). Meanwhile, another breakthrough research used liquid metal-silicone composite materials containing alcohol droplets that can trigger rapid volume expansion through controlled phase changes, enabling large-scale free deformation and shape recovery of the material (Wang H. et al., 2019). This thermal-driven mechanism provides a new paradigm for non-contact control of soft robots. Furthermore, the use of liquid metals in soft grippers not only leverages their fluidity to change the shape of the gripper (Zhou et al., 2020; Liao and Majidi, 2022) but also endows large-deformation soft robots with the ability to sense the environment and make autonomous decisions (Xie et al., 2023; Li N. et al., 2024). However, the high electrical conductivity of liquid metals could cause electromagnetic interference, which needs to be considered in design.
3.7 Summary
To further provide a quantitative comparison, the key performance metrics of various smart materials are summarized in Table 2. This includes their output force or energy density, achievable strain range, response speed, and representative application scenarios in soft grippers. Such a comparison highlights the trade-offs among different materials, offering insights for selecting suitable actuation strategies depending on specific design requirements.
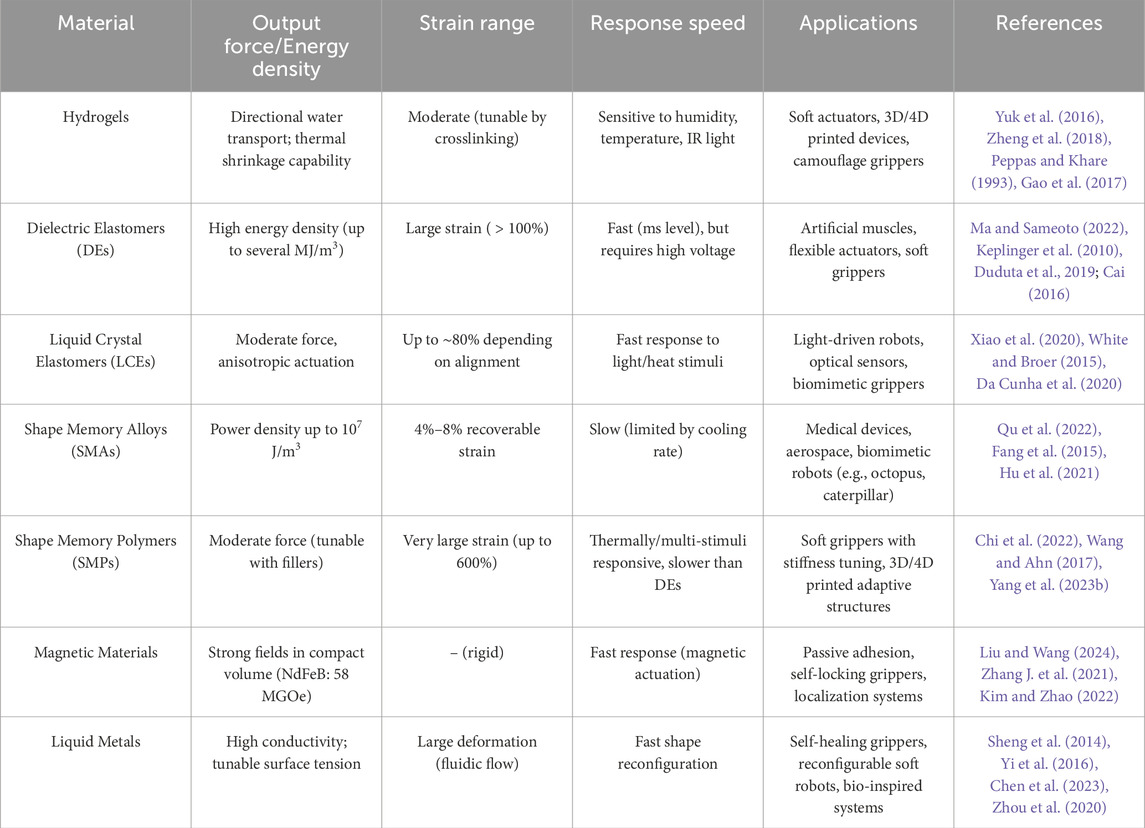
Table 2. Quantitative analysis and applications of soft grippers with different materials.
4 Performance evaluation
In various application scenarios, soft grippers need to adapt to the shapes of different objects and provide enough gripping force to securely hold them. Additionally, they will frequently come into contact with various surfaces during use. Therefore, gripping ability, material properties, and cycle life are key factors that determine their performance. Furthermore, for applications that require fast gripping, the response speed of the soft gripper (i.e., the time from issuing the gripping command to completing the gripping action) is also very important. As a result, many review articles have evaluated the performance metrics of soft grippers (Shintake et al., 2018; Zaidi et al., 2021), focusing on aspects such as enhanced gripping ability, gripper size, object size, and response time. Terrile et al. (2021) also fabricated and tested grippers with different actuation methods. After testing with 12 types of objects in 3 environments, they found that electromechanical-actuated grippers performed the best, with a gripping success rate of 86%.
As the application of soft robotics continues to expand, the lifespan and manufacturing cost of grippers will affect their economic viability in industrial applications. Therefore, in addition to conventional performance aspects, this section also compares the performance of different types of grippers in terms of cycle life, cost-effectiveness, and application scenarios.
From Table 3, it is clear that soft grippers with different actuation methods not only have varying environmental adaptability but are also closely tied to their material properties. For example, fluid-driven soft grippers require materials with excellent compressive strength due to their application in high-pressure environments, while electrically actuated soft grippers rely on materials with high electrical conductivity and good electrochemical stability to ensure excellent cycle stability. A cable-driven gripper exhibited a cyclic lifespan exceeding 500 cycles, meeting the requirements for continuous operation on production lines (Rodrigue et al., 2015). Comparative experiments demonstrated that mechanical actuation improved grasping accuracy by approximately 20 % relative to conventional hydraulic actuation (Tondu et al., 2009). Although soft grippers with different actuation methods have similar lifting capacity ranges, those driven by thermal fields stand out for their remarkable lifting performance. For example, shape memory alloy (SMA) wires have been embedded into an origami structure, resulting in a gripper weighing only 2.9 g but capable of handling loads of 2.7 kg or more, demonstrating excellent load-bearing capacity (Kim et al., 2015).
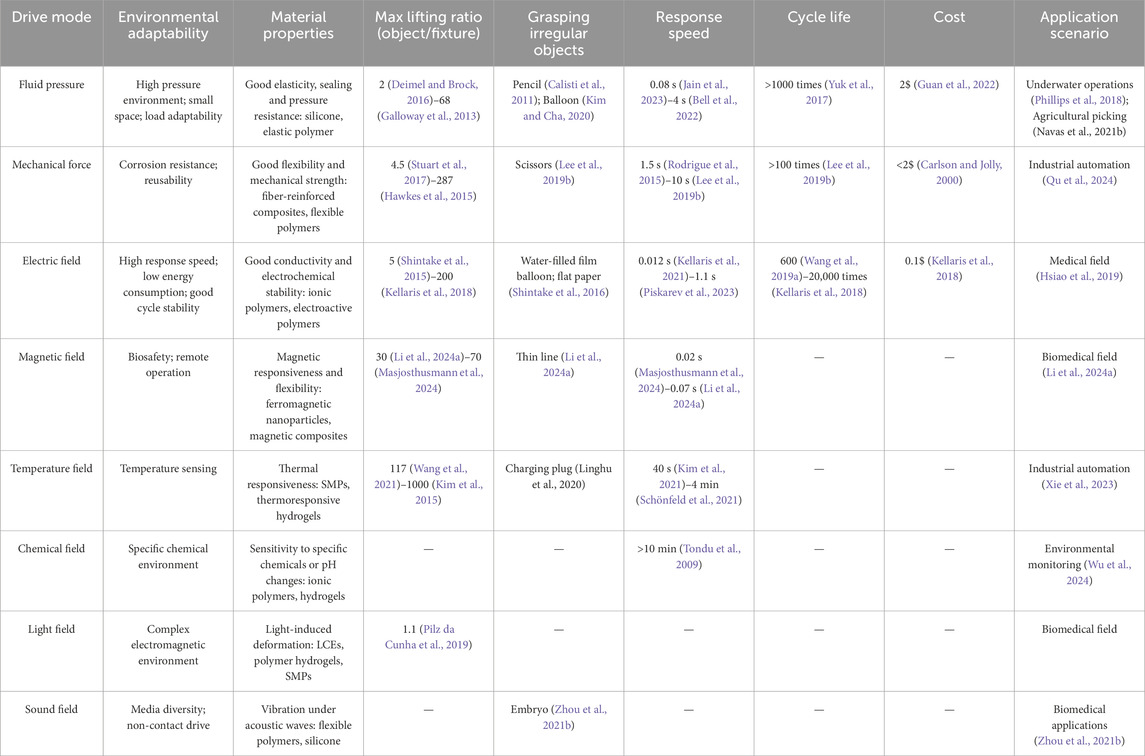
Table 3. Performance comparison of soft grippers with different actuation modes.
In addition to handling conventional objects (Zhou Y. et al., 2021) used flexible liquid-gas interface acoustic-enhanced adhesion technology to capture, release, transport, and rotate small targets (ranging from 950 microns to 1.4 mm). This technology has significantly broadened the scope of soft gripper applications in biology and medicine. Furthermore, by combining various gripping methods–such as the particle clogging and electroadhesion discussed in Section 1.3 (Piskarev et al., 2023)–soft grippers are capable of lifting heavy objects while precisely gripping flat or fragile items. However, this composite gripping method requires careful consideration of the activation times of different mechanisms to ensure the coordination and efficiency of operations. In terms of response speed (as shown in Table 1), future research can focus on optimizing soft grippers that combine electromagnetic coupling or thermal fields with pH-responsive mechanisms to achieve a dual-response system. This will help enable gentle and safe handling of biological samples, further expanding the application potential in the biomedical field.
In terms of economic benefits, while there are few studies detailing the cycle life and preparation costs of grippers, existing research indicates that the performance of some grippers already meets the economic requirements for industrial applications. For example, an innovative method was proposed to convert inexpensive (about $5/kg) high-strength polymer fibers into artificial muscles, significantly reducing production costs (Haines et al., 2014). Additionally, Yue et al. (2022) simplified system complexity and reduced costs by using low-pressure differential-driven suction cups, providing new insights into the economic design of soft grippers.
The application fields of soft grippers can be broadly categorized into industrial automation, biomedical applications, underwater operations, and environmental monitoring. In industrial automation, mechanically and fluidically driven grippers are well-suited for repetitive tasks and operations in confined spaces due to their high load adaptability and corrosion resistance. However, they tend to have slower response speeds and higher costs. In the biomedical field, soft grippers driven by electric fields, magnetic fields, and acoustic fields are favored for their fast response times, high precision, and biological safety, though issues like limited cycle life and insufficient load-bearing capacity remain. In underwater operations, fluid pressure-driven grippers perform exceptionally well, though their sealing and compressive strength requirements pose challenges for material selection. In environmental monitoring, chemically-driven grippers can adapt to specific chemical environments, but their sensitivity to the environment also limits their application in complex conditions. As shown in Figure 14, pneumatic soft grippers remain the most widely used today. Examples include commercial soft grippers for industrial sorting (Figure 14a) and Schmalz’s mGrip series finger grippers (Figure 14b)–ideal for repetitive tasks (e.g., assembly line sorting) and operations in confined spaces. In addition, the figure also presents other function-oriented innovative soft gripper designs. Among them, the actively wound variable-stiffness soft gripper (Figure 14c) can achieve adaptive grasping of irregularly shaped objects through a structural winding mechanism. Another example is a 3D-printed soft robotic end-effector (Figure 14d), which has been applied in a robotic applepicking system.

Figure 14. Application scenarios and structural characteristics of soft robotic grippers with different actuation or functional designs. (a) Practical application demonstration of a commercial soft robotic gripper in industrial sorting tasks. Reproduced with permission from Soft Robot (Tech, 2024) Copyright 2024, Soft Robot Tech. (b) Structural design and object-grasping test of the mGrip series finger gripper for delicate object handling. Reproduced with permission from Schmalz (2024) Copyright 2024, Schmalz GmbH. (c) Active stiffness-tunable soft gripper based on active entanglement, realizing adaptive grasping of irregularly shaped objects. Reproduced with permission from Becker et al. (2022) Copyright 2022, National Academy of Sciences (PNAS). (d) 3D-printed soft-robotic end-effector applied in a robotic apple harvesting system, showing the gripper in field apple-grasping operations. Reproduced with permission from Hohimer et al. (2019) Copyright 2019, ASABE (American Society of Agricultural and Biological Engineers).
5 Challenges and limitations
From this perspective, compared to traditional rigid mechanical hands, soft grippers have a wider variety of driving mechanisms to achieve different functions. These include fluid-based drive for high power-to-weight ratios and magnetic field drive for remote and precise control. Due to their construction from flexible materials, soft grippers can adapt their shape to grab irregular or soft objects, and some materials even possess self-healing abilities, significantly enhancing their lifespan. Additionally, soft grippers can better adapt to various environments, including confined spaces and unstructured settings, allowing them to complete complex tasks effectively.
However, despite these many advantages, soft grippers also have some drawbacks: First, current drive mechanisms, such as fluid and cable-driven systems, still rely on large external components. To address this, modular and integrated designs should be adopted to reduce reliance on traditional air pumps or hydraulic systems. For instance, liquid–gas phase transition actuators have achieved output forces of several newtons (Guo et al., 2024), while magnetorheological regulation has successfully reduced external pump dependence (McDonald et al., 2020). Future research could focus on exploring new fluid mediums, such as low boiling point liquids or special gases, which may offer higher efficiency or lower energy consumption during actuation.
Secondly, the material properties of soft grippers may degrade with prolonged use or frequent gripping, leading to issues like reduced elasticity or hardness changes. Experimental results show that a bioinspired soft interlocking structure improves load-bearing capacity by more than 30% (Huang et al., 2024), while woven entangled designs retain over 80% toughness after multiple cycles (Kang et al., 2023). Additionally, combining materials with different properties can leverage each material’s strengths, or shape-programmable structures (Tan X. et al., 2023; Cao et al., 2023) can be designed based on mechanical stretching instability principles, allowing for controlled shape changes under external forces to improve adaptability and durability.
Finally, most existing soft grippers still have a single gripping mode, which falls short compared to the dexterity of human hands. In practical applications, such as in the food industry, assistive technology, and deep-sea operations, there are still issues with low precision and slow response time. Studies have demonstrated that metamaterial-based designs can significantly enhance deformation and adaptability (Tan et al., 2024a; Tan et al., 2024b; Liu X. et al., 2024; Qin et al., 2025), while integration with underactuated mechanisms improves functional performance. When combined with comprehensive strategies such as stress-response mechanisms, high-precision control systems, and underactuated structures, their performance and application scope can be further optimized. The cost of manufacturing soft grippers remains a challenge. For example, the use of low-cost plastics has reduced production cycles (Zhou et al., 2024), while 3D printing technologies (Li S. et al., 2024) and biodegradable PEEK composites (Li et al., 2025; Cao et al., 2025) have demonstrated the potential to balance low cost with sustainability.
In summary, while soft grippers show great promise, addressing these challenges through advanced materials, better actuation systems, and cost-effective manufacturing methods will be key to their broader industrial and practical applications. Table 4 provides a structured overview of the main challenges, representative quantitative progress, and possible future directions.
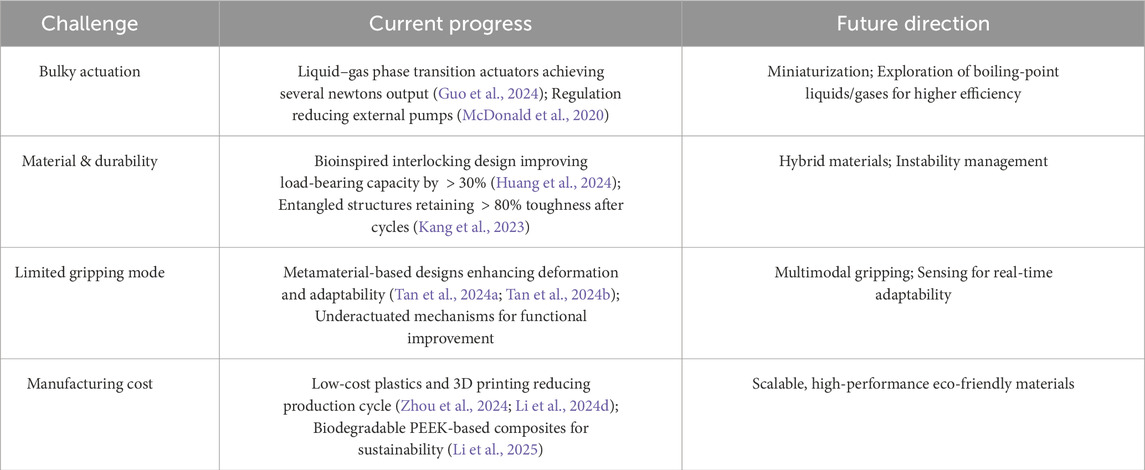
Table 4. Challenges, current progress, and future directions of soft grippers.
Author contributions
YZ: Data curation, Conceptualization, Writing – original draft. JM: Writing – original draft, Formal Analysis, Conceptualization, Methodology. XL: Writing – review and editing, Project administration, Supervision, Investigation. SL: Writing – original draft, Conceptualization, Validation. BC: Project administration, Formal Analysis, Methodology, Writing – review and editing, Visualization. LY: Methodology, Data curation, Validation, Writing – review and editing. XT: Writing – review and editing, Validation, Project administration, Formal Analysis, Data curation.
Funding
The author(s) declare that financial support was received for the research and/or publication of this article. This work was supported by National Natural Science Foundation of China (Nos 12302190, 12202084, and 52175084), the Science Foundation of the National Key Laboratoryof Science and Technology on Advanced Composites in Special Environments (No. JCKYS2023603C018), and the Central Guiding Local Science and Technology Development Fund Project (Grant No. 236Z2204G).
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Correction note
This article has been corrected with minor changes. These changes do not impact the scientific content of the article.
Generative AI statement
The author(s) declare that no Generative AI was used in the creation of this manuscript.
Any alternative text (alt text) provided alongside figures in this article has been generated by Frontiers with the support of artificial intelligence and reasonable efforts have been made to ensure accuracy, including review by the authors wherever possible. If you identify any issues, please contact us.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Abondance, S., Teeple, C., and Wood, R. (2020). A dexterous soft robotic hand for delicate in-hand manipulation. IEEE Robotics Automation Lett. 5 (4), 5502–5509. doi:10.1109/lra.2020.3007411
Acome, E., Mitchell, S., Morrissey, T., Emmett, M. B., Benjamin, C., King, M., et al. (2018). Hydraulically amplified self-healing electrostatic actuators with muscle-like performance. Science 359 (6371), 61–65. doi:10.1126/science.aao6139
Ahmed, E. (2015). Hydrogel: preparation, characterization, and applications: a review. J. Adv. Res. 6 (2), 105–121. doi:10.1016/j.jare.2013.07.006
Ahn, J., Gu, J., Choi, J., Han, C., Jeong, Y., Park, J., et al. (2022). A review of recent advances in electrically driven polymer-based flexible actuators: smart materials, structures, and their applications. Adv. Mater. Technol. 7 (11), 2200041. doi:10.1002/admt.202200041
Algamal, A., Abedi, H., Gandhi, U., Benafan, O., Elahinia, M., and Qattawi, A. (2024). Manufacturing, processing, applications, and advancements of fe-based shape memory alloys. J. Alloys Compd. 1010, 177068. doi:10.1016/j.jallcom.2024.177068
Alici, G., Canty, T., Mutlu, R., Hu, W., and Sencadas, V. (2018). Modeling and experimental evaluation of bending behavior of soft pneumatic actuators made of discrete actuation chambers. Soft Robot. 5 (1), 24–35. doi:10.1089/soro.2016.0052
Allafi, J., Ren, X., and Eggeler, G. (2002). The mechanism of multistage martensitic transformations in aged ni-rich niti shape memory alloys. Acta Mater. 50 (4), 793–803. doi:10.1016/s1359-6454(01)00385-8
Amend, J., Brown, E., Rodenberg, N., Jaeger, H. M., and Lipson, H. (2012). A positive pressure universal gripper based on the jamming of granular material. IEEE Trans. Robotics 28 (2), 341–350. doi:10.1109/tro.2011.2171093
Aoki, D., Teramoto, Y., and Nishio, Y. (2007). Sh-containing cellulose acetate derivatives: preparation and characterization as a shape memory-recovery material. Biomacromolecules 8 (12), 3749–3757. doi:10.1021/bm7006828
Araromi, O., Conn, A., Ling, C., Rossiter, J., Vaidyanathan, R., and Burgess, S. (2011). Spray deposited multilayered dielectric elastomer actuators. Sensors Actuators A-Physical 167 (2), 459–467. doi:10.1016/j.sna.2011.03.004
Araromi, O., Gavrilovich, I., Shintake, J., Rosset, S., Richard, M., Gass, V., et al. (2014). Rollable multisegment dielectric elastomer minimum energy structures for a deployable microsatellite gripper. IEEE/ASME Trans. Mechatronics 20 (1), 438–446. doi:10.1109/tmech.2014.2329367
Backus, S., and Dollar, A. (2016). An adaptive three-fingered prismatic gripper with passive rotational joints. IEEE Robotics Automation Lett. 1 (2), 668–675. doi:10.1109/lra.2016.2516506
Bartlett, M., Kazem, N., Powell-Palm, M., Huang, X., Sun, W., Malen, J. A., et al. (2017). High thermal conductivity in soft elastomers with elongated liquid metal inclusions. Proc. Natl. Acad. Sci. 114 (9), 2143–2148. doi:10.1073/pnas.1616377114
Bastola, A., and Hossain, M. (2021). The shape–morphing performance of magnetoactive soft materials. Mater. & Des. 211, 110172. doi:10.1016/j.matdes.2021.110172
Becker, K., Teeple, C., Charles, N., Jung, Y., Baum, D., Weaver, J. C., et al. (2022). Active entanglement enables stochastic, topological grasping. Proc. Natl. Acad. Sci. 119 (42), e2209819119. doi:10.1073/pnas.2209819119
Bell, M., Gorissen, B., Bertoldi, K., Weaver, J. C., and Wood, R. J. (2022). A modular and self-contained fluidic engine for soft actuators. Adv. Intell. Syst. 4 (1), 2100094. doi:10.1002/aisy.202100094
Ben Abu, E., Veksler, Y., Elbaz, S., Zigelman, A., and Gat, A. D. (2023). Growing structure based on viscous actuation of constrained multistable elements. Adv. Mater. Technol. 8 (14), 2202184. doi:10.1002/admt.202202184
Bistable and Multistable Actuators for Soft Robots (2023). Design of bistable structure of soft robot and research on its adjustable response characteristics, Ph.D. thesis. Xi'an, China: Xi’an University of Architecture and Technology. doi:10.27393/d.cnki.gxazu.2023.001632
Bogdanski, D., Köller, M., Müller, D., Muhr, G., Bram, M., Buchkremer, H. P., et al. (2002). Easy assessment of the biocompatibility of ni–ti alloys by in vitro cell culture experiments on a functionally graded ni–niti–ti material. Biomaterials 23 (23), 4549–4555. doi:10.1016/s0142-9612(02)00200-4
Boubekri, N., and Chakraborty, P. (2002). Robotic grasping: gripper designs, control methods and grasp configurations – a review of research. Integr. Manuf. Syst. 13 (7), 520–531. doi:10.1108/09576060210442978
Breitman, P., Pukshansky, M., Zigelman, A., Abu, E. B., Peretz, O., Givli, S., et al. (2022). Flows in straws: viscous flows in one-dimensional metamaterial. Phys. Rev. Appl. 18 (6), 064077. doi:10.1103/physrevapplied.18.064077
Brown, E., Rodenberg, N., Amend, J., Mozeika, A., Steltz, E., Zakin, M. R., et al. (2010). Universal robotic gripper based on the jamming of granular material. Proc. Natl. Acad. Sci. 107 (44), 18809–18814. doi:10.1073/pnas.1003250107
Buwalda, S., Boere, K., Dijkstra, P., Feijen, J., Vermonden, T., and Hennink, W. E. (2014). Hydrogels in a historical perspective: from simple networks to smart materials. J. Control. Release 190, 254–273. doi:10.1016/j.jconrel.2014.03.052
Cai, J. (2016). 4d printing dielectric elastomer actuator based soft robots. Fayetteville, AR: University of Arkansas, Ph.D. thesis.
Çakmak, U., Fischlschweiger, M., Graz, I., and Major, Z. (2020). Adherence kinetics of a pdms gripper with inherent surface tackiness. Polymers 12 (11), 2440. doi:10.3390/polym12112440
Calisti, M., Giorelli, M., Levy, G., Mazzolai, B., Hochner, B., Laschi, C., et al. (2011). An octopus-bioinspired solution to movement and manipulation for soft robots. Bioinspiration & biomimetics 6 (3), 036002. doi:10.1088/1748-3182/6/3/036002
Campbell, P. (1996). Permanent magnet materials and their application. Cambridge, UK: Cambridge University Press.
Cao, B., Ghavidelnia, N., Speck, O., and Eberl, C. (2023). Flow charts as a method to transfer self-sealing from plant models into programmable materials and related challenges. Program. Mater. 1, e12. doi:10.1017/pma.2023.11
Cao, B., Liu, X., Man, J., Wang, B., and Tan, X. (2025). Peek-based orthopedic composites and structures for orthopedic repair: a review. Polym. Compos. 46 (6), 1542–1558. doi:10.1002/pc.70025
Carlson, J., and Jolly, M. (2000). Mr fluid, foam and elastomer devices. Mechatronics 10 (4-5), 555–569. doi:10.1016/s0957-4158(99)00064-1
Champeau, M., Heinze, D., Viana, T., de Souza, E. R., Chinellato, A. C., and Titotto, S. (2020). 4d printing of hydrogels: a review. Adv. Funct. Mater. 30 (31), 1910606. doi:10.1002/adfm.201910606
Chen, S., Hu, J., Yuen, C., and Chan, L. (2009). Novel moisture-sensitive shape memory polyurethanes containing pyridine moieties. Polymer 50 (19), 4424–4428. doi:10.1016/j.polymer.2009.07.031
Chen, S., Wang, H., Zhao, R., Rao, W., and Liu, J. (2020a). Liquid metal composites. Matter 2 (6), 1446–1480. doi:10.1016/j.matt.2020.03.016
Chen, Y., Zhao, X., Luo, C., Shao, Y., Yang, M. B., and Yin, B. (2020b). A facile fabrication of shape memory polymer nanocomposites with fast light-response and self-healing performance. Compos. Part A Appl. Sci. Manuf. 135, 105931. doi:10.1016/j.compositesa.2020.105931
Chen, S., Wang, H., Liu, T., and Liu, J. (2023). Liquid metal smart materials toward soft robotics. Adv. Intell. Syst. 5 (8), 2200375. doi:10.1002/aisy.202200375
Chen, Q., Schott, D., and Jovanova, J. (2024). Model-based design of variable stiffness soft gripper actuated by smart hydrogels. Soft Robot. 11, 924–934. doi:10.1089/soro.2023.0185
Chi, Y., Li, Y., Zhao, Y., Hong, Y., Tang, Y., and Yin, J. (2022). Bistable and multistable actuators for soft robots: structures, materials, and functionalities. Adv. Mater. 34 (19), 2110384. doi:10.1002/adma.202110384
Chortos, A., Hajiesmaili, E., Morales, J., Clarke, D. R., and Lewis, J. A. (2020). 3d printing of interdigitated dielectric elastomer actuators. Adv. Funct. Mater. 30 (1), 1907375. doi:10.1002/adfm.201907375
Chortos, A., Mao, J., Mueller, J., Hajiesmaili, E., Lewis, J. A., and Clarke, D. R. (2021). Printing reconfigurable bundles of dielectric elastomer fibers. Adv. Funct. Mater. 31 (22), 2010643. doi:10.1002/adfm.202010643
Chung, H., Parsons, A., and Zheng, L. (2021). Magnetically controlled soft robotics utilizing elastomers and gels in actuation: a review. Adv. Intell. Syst. 3 (3), 2000186. doi:10.1002/aisy.202000186
Cianchetti, M., Calisti, M., Margheri, L., Kuba, M., and Laschi, C. (2015). Bioinspired locomotion and grasping in water: the soft eight-arm octopus robot. Bioinspiration & Biomimetics 10 (3), 035003. doi:10.1088/1748-3190/10/3/035003
CMES (2024). Robotics development recommendations. Available online at: https://www.cmes.org/library/recom/2de94b7c43754d97a4bb6541d7d3f307.html.
Commission, E. (2024). Horizon europe: robotics and ai strategy. Available online at: https://op.europa.eu/en/publication-detail/-/publication/6abcc8e7-e685-11ee-8b2b-01aa75ed71.
Coulson, R., Stabile, C., Turner, K., and Majidi, C. (2022). Versatile soft robot gripper enabled by stiffness and adhesion tuning via thermoplastic composite. Soft Robot. 9 (2), 189–200. doi:10.1089/soro.2020.0088
Da Cunha, M., Debije, M., and Schenning, A. (2020). Bioinspired light-driven soft robots based on liquid crystal polymers. Chem. Soc. Rev. 49 (18), 6568–6578. doi:10.1039/d0cs00363h
Dasgupta, R. (2014). A look into cu-based shape memory alloys: present scenario and future prospects. J. Mater. Res. 29 (16), 1681–1698. doi:10.1557/jmr.2014.189
De Pascali, C., Naselli, G. A., Palagi, S., Scharff, R. B. N., and Mazzolai, B. (2022). 3d-printed biomimetic artificial muscles using soft actuators that contract and elongate. Sci. Robotics 7 (68), eabn4155. doi:10.1126/scirobotics.abn4155
Deimel, R., and Brock, O. (2016). A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robotics Res. 35 (1-3), 161–185. doi:10.1177/0278364915592961
Delaey, J., Dubruel, P., and Van Vlierberghe, S. (2020). Shape-memory polymers for biomedical applications. Adv. Funct. Mater. 30 (44), 1909047. doi:10.1002/adfm.201909047
Do, T., Phan, H., Nguyen, T., and Visell, Y. (2018). Miniature soft electromagnetic actuators for robotic applications. Adv. Funct. Mater. 28 (18), 1800244. doi:10.1002/adfm.201800244
Duan, J., Liang, X., Zhu, K., Guo, J., and Zhang, L. (2017). Bilayer hydrogel actuators with tight interfacial adhesion fully constructed from natural polysaccharides. Soft Matter 13 (2), 345–354. doi:10.1039/c6sm02089e
Duduta, M., Hajiesmaili, E., Zhao, H., Wood, R. J., and Clarke, D. R. (2019). Realizing the potential of dielectric elastomer artificial muscles. Proc. Natl. Acad. Sci. 116 (7), 2476–2481. doi:10.1073/pnas.1815053116
Dzedzickis, A., Petronienė, J., Petkevičius, S., and Bučinskas, V. (2024). Soft grippers in robotics: progress of last 10 years. Machines 12 (12), 887. doi:10.3390/machines12120887
Eshaghi, M., Ghasemi, M., and Khorshidi, K. (2021). Design, manufacturing and applications of small-scale magnetic soft robots. Extreme Mech. Lett. 44, 101268. doi:10.1016/j.eml.2021.101268
Fan, M., Guo, H., Li, S., Han, Y., and Pan, Y. (2023). Experimental and numerical study on the mechanical properties of niti-sma bars. Structures 58, 105425. doi:10.1016/j.istruc.2023.105425
Fang, C., Yam, M. C. H., Ma, H., and Chung, K. F. (2015). Tests on superelastic ni–ti sma bars under cyclic tension and direct-shear: towards practical recentring connections. Mater. Struct. 48, 1013–1030. doi:10.1617/s11527-013-0212-4
Fang, L., Fang, T., Liu, X., Ni, Y., Lu, C., and Xu, Z. (2017). Precise stimulation of near-infrared light responsive shape-memory polymer composites using upconversion particles with photothermal capability. Compos. Sci. Technol. 152, 190–197. doi:10.1016/j.compscitech.2017.09.021
Feng, C., Zhiqiang, X., Kewen, C., Xiaodong, W., and Shengqiang, J. (2024a). 3d printed magnetic bionic robot inspired by octopus for drug transportation. Soft Robot. 11, 1068–1077. doi:10.1089/soro.2023.0055
Feng, W., Sun, L., Jin, Z., Chen, L., Liu, Y., Xu, H., et al. (2024b). A large-strain and ultrahigh energy density dielectric elastomer for fast moving soft robot. Nat. Commun. 15 (1), 4222. doi:10.1038/s41467-024-48243-y
Firouzeh, A., and Paik, J. (2017). An under-actuated origami gripper with adjustable stiffness joints for multiple grasp modes. Smart Mater. Struct. 26 (5), 055035. doi:10.1088/1361-665x/aa67fd
Florian, G., Gabor, A. R., Nicolae, C. A., Rotaru, A., Stănică, N., Bîzdoacă, N. G., et al. (2020). Thermomechanical, calorimetric and magnetic properties of a ni–ti shape-memory alloy wire. J. Therm. Analysis Calorim. 140, 527–544. doi:10.1007/s10973-019-08869-3
Forterre, Y., Skotheim, J., Dumais, J., and Mahadevan, L. (2005). How the venus flytrap snaps. Nature 433 (7024), 421–425. doi:10.1038/nature03185
Fowler, H., Rothemund, P., Keplinger, C., and White, T. J. (2021). Liquid crystal elastomers with enhanced directional actuation to electric fields. Adv. Mater. 33 (43), 2103806. doi:10.1002/adma.202103806
Galloway, K. C., Polygerinos, P., Walsh, C. J., and Wood, R. J. (2013). “Mechanically programmable bend radius for fiber-reinforced soft actuators,” in 2013 16th international Conference on advanced robotics (New York, NY: ICAR conference proceedings IEEE), 1–6.
Galloway, K., Becker, K., Phillips, B., Kirby, J., Licht, S., Tchernov, D., et al. (2016). Soft robotic grippers for biological sampling on deep reefs. Soft Robot. 3 (1), 23–33. doi:10.1089/soro.2015.0019
Gan, D., Huang, Z., Wang, X., Jiang, L., Wang, C., Zhu, M., et al. (2020). Graphene oxide-templated conductive and redox-active nanosheets incorporated hydrogels for adhesive bioelectronics. Adv. Funct. Mater. 30 (5), 1907678. doi:10.1002/adfm.201907678
Gao, W., Pei, A., and Wang, J. (2012). Water-driven micromotors. ACS Nano 6 (9), 8432–8438. doi:10.1021/nn303309z
Gao, L., Guo, G., Liu, M., Tang, Z., Xie, L., and Huo, Y. (2017). Multi-responsive, bidirectional, and large deformation bending actuators based on borax cross-linked polyvinyl alcohol derivative hydrogel. RSC Adv. 7 (63), 40005–40014. doi:10.1039/c7ra06617a
Giannaccini, M., Georgilas, I., Horsfield, I., Peiris, B. H. P. M., Lenz, A., Pipe, A. G., et al. (2014). A variable compliance, soft gripper. Aut. Robots 36, 93–107. doi:10.1007/s10514-013-9374-8
Guan, R., Zheng, H., Liu, Q., Ou, K., Li, D. s., Fan, J., et al. (2022). Diw 3d printing of hybrid magnetorheological materials for application in soft robotic grippers. Compos. Sci. Technol. 223, 109409. doi:10.1016/j.compscitech.2022.109409
Gultepe, E., Randhawa, J. S., Kadam, S., Yamanaka, S., Selaru, F. M., Shin, E. J., et al. (2013). Biopsy with thermally-responsive untethered microtools. Adv. Mater. 25 (4), 514–519. doi:10.1002/adma.201203348
Guo, J., Zhang, R., Zhang, L., and Cao, X. (2018). 4d printing of robust hydrogels consisted of agarose nanofibers and polyacrylamide. ACS Macro Lett. 7 (4), 442–446. doi:10.1021/acsmacrolett.7b00957
Guo, X., Tang, W., Qin, K., Zhong, Y., Xu, H., Qu, Y., et al. (2024). Powerful uav manipulation via bioinspired self-adaptive soft self-contained gripper. Sci. Adv. 10 (19), eadn6642. doi:10.1126/sciadv.adn6642
Guo, S., Agarwal, T., Song, S., Sarkar, K., and Zhang, L. G. (2025). Development of novel multi-responsive 4d printed smart nanocomposites with polypyrrole coated iron oxides for remote and adaptive transformation. Mater. Horizons 12 (11), 3907–3917. doi:10.1039/d4mh01804d
Haghiashtiani, G., Habtour, E., Park, S., Gardea, F., and McAlpine, M. C. (2018). 3d printed electrically-driven soft actuators. Extreme Mech. Lett. 21, 1–8. doi:10.1016/j.eml.2018.02.002
Haines, C., Lima, M., Li, N., Spinks, G. M., Foroughi, J., Madden, J. D. W., et al. (2014). Artificial muscles from fishing line and sewing thread. Science 343 (6173), 868–872. doi:10.1126/science.1246906
Han, D., Lu, Z., Chester, S., and Lee, H. (2018). Micro 3d printing of a temperature-responsive hydrogel using projection micro-stereolithography. Sci. Rep. 8 (1), 1963. doi:10.1038/s41598-018-20385-2
Hawkes, E. W., Christensen, D. L., Han, A. K., Jiang, H., and Cutkosky, M. R. (2015). “Grasping without squeezing: shear adhesion gripper with fibrillar thin film,” in 2015 IEEE international Conference on robotics and automation (ICRA) (IEEE), 2305–2312.
He, Q., Wang, Z., Wang, Y., Minori, A., Tolley, M. T., and Cai, S. (2019). Electrically controlled liquid crystal elastomer–based soft tubular actuator with multimodal actuation. Sci. Adv. 5 (10), eaax5746. doi:10.1126/sciadv.aax5746
He, Q., Wang, Z., Wang, Y., Song, Z., and Cai, S. (2020). Recyclable and self-repairable fluid-driven liquid crystal elastomer actuator. ACS Appl. Mater. & Interfaces 12 (31), 35464–35474. doi:10.1021/acsami.0c10021
Hedayati Dezfuli, F., and Alam, M. (2018). Smart lead rubber bearings equipped with ferrous shape memory alloy wires for seismically isolating highway bridges. J. Earthq. Eng. 22 (6), 1042–1067. doi:10.1080/13632469.2016.1269692
Hennink, W., and van Nostrum, C. (2012). Novel crosslinking methods to design hydrogels. Adv. Drug Deliv. Rev. 64, 223–236. doi:10.1016/j.addr.2012.09.009
Hohimer, C. J., Wang, H., Bhusal, S., Miller, J., Mo, C., and Karkee, M. (2019). Design and field evaluation of a robotic apple harvesting system with a 3d-printed soft-robotic end-effector. Trans. ASABE 62 (2), 405–414. doi:10.13031/trans.12986
Howard, D., O’Connor, J., Brett, J., and Delaney, G. W. (2021). “Shape, size, and fabrication effects in 3d printed granular jamming grippers,” in IEEE 4th international Conference on soft robotics (RoboSoft). IEEE, 458–464.
Hsiao, J., Chang, J., and Cheng, C. (2019). Soft medical robotics: clinical and biomedical applications, challenges, and future directions. Adv. Robot. 33 (21), 1099–1111. doi:10.1080/01691864.2019.1679251
Hu, J., Zhu, Y., Huang, H., and Lu, J. (2012). Recent advances in shape–memory polymers: structure, mechanism, functionality, modeling and applications. Prog. Polym. Sci. 37 (12), 1720–1763. doi:10.1016/j.progpolymsci.2012.06.001
Hu, L., Yuan, B., and Liu, J. (2017). Liquid metal amoeba with spontaneous pseudopodia formation and motion capability. Sci. Rep. 7 (1), 7256. doi:10.1038/s41598-017-07678-8
Hu, K., Rabenorosoa, K., and Ouisse, M. (2021). A review of sma-based actuators for bidirectional rotational motion: application to origami robots. Front. Robotics AI 8, 678486. doi:10.3389/frobt.2021.678486
Hu, S., Tan, K., Zhang, B., and Liu, W. (2022). Review on research progress of hydraulic powered soft actuators. Energies 15 (23), 9048. doi:10.3390/en15239048
Huang, C., Lv, J., Tian, X., Wang, Y., Liu, J., and Yu, Y. (2016). A remotely driven and controlled micro-gripper fabricated from light-induced deformation smart material. Smart Mater. Struct. 25 (9), 095009. doi:10.1088/0964-1726/25/9/095009
Huang, J., Gai, L., Zong, X., and Li, Y. (2024). A bio-inspired mutual-hook strategy for the soft finger to improve load-bearing capacity and grasping stability. J. Bionic Eng. 21 (3), 1290–1304. doi:10.1007/s42235-024-00492-9
Hughes, J., Culha, U., Giardina, F., Guenther, F., Rosendo, A., and Iida, F. (2016). Soft manipulators and grippers: a review. Front. Robotics AI 3, 69. doi:10.3389/frobt.2016.00069
Ilievski, F., Mazzeo, A., Shepherd, R., Chen, X., and Whitesides, G. M. (2011). Soft robotics for chemists. Angew. Chem. Int. Ed. 50, 1890–1895. doi:10.1002/anie.201006464
Ishak, Z., Chow, W., Takeichi, T., and Rochmadi, (2008). Influence of sebs-g-ma on morphology, mechanical, and thermal properties of pa6/pp/organoclay nanocomposites. Eur. Polym. J. 44 (4), 1023–1039. doi:10.1016/j.eurpolymj.2008.01.019
Iwasaki, H., Lefevre, F., Damian, D., Iwase, E., and Miyashita, S. (2020). Autonomous and reversible adhesion using elastomeric suction cups for in-vivo medical treatments. IEEE Robotics Automation Lett. 5 (2), 1–2022. doi:10.1109/lra.2020.2970633
Jain, S., Dontu, S., Teoh, J., and Alvarado, P. V. Y. (2023). A multimodal, reconfigurable workspace soft gripper for advanced grasping tasks. Soft Robot. 10 (3), 527–544. doi:10.1089/soro.2021.0225
Jani, J. M., Leary, M., Subic, A., and Gibson, M. A. (2014). A review of shape memory alloy research, applications and opportunities. Mater. & Des. 56, 1078–1113. doi:10.1016/j.matdes.2013.11.084
Jin, B., Song, H., Jiang, R., Song, J., Zhao, Q., and Xie, T. (2018). Programming a crystalline shape memory polymer network with thermo-and photo-reversible bonds toward a single-component soft robot. Sci. Adv. 4 (1), eaao3865. doi:10.1126/sciadv.aao3865
Jumet, B., Bell, M., Sanchez, V., and Preston, D. J. (2022). A data-driven review of soft robotics. Adv. Intell. Syst. 4 (4), 2100163. doi:10.1002/aisy.202100163
Kang, G., Kim, Y. J., Lee, S. J., Lee, D. Y., and Song, K. (2023). Grasping through dynamic weaving with entangled closed loops. Nat. Commun. 14 (1), 4633. doi:10.1038/s41467-023-40358-y
Kellaris, N., Gopaluni Venkata, V., Smith, G., Mitchell, S. K., and Keplinger, C. (2018). Peano-hasel actuators: muscle-mimetic, electrohydraulic transducers that linearly contract on activation. Sci. Robotics 3 (14), eaar3276. doi:10.1126/scirobotics.aar3276
Kellaris, N., Rothemund, P., Zeng, Y., Mitchell, S. K., Smith, G. M., Jayaram, K., et al. (2021). Spider-inspired electrohydraulic actuators for fast, soft-actuated joints. Adv. Sci. 8 (14), 2100916. doi:10.1002/advs.202100916
Keplinger, C., Kaltenbrunner, M., Arnold, N., and Bauer, S. (2010). Röntgen’s electrode-free elastomer actuators without electromechanical pull-in instability. Proc. Natl. Acad. Sci. 107 (10), 4505–4510. doi:10.1073/pnas.0913461107
Kim, Y., and Cha, Y. (2020). Soft pneumatic gripper with a tendon-driven soft origami pump. Front. Bioeng. Biotechnol. 8, 461. doi:10.3389/fbioe.2020.00461
Kim, Y., and Zhao, X. (2022). Magnetic soft materials and robots. Chem. Rev. 122 (5), 5317–5364. doi:10.1021/acs.chemrev.1c00481
Kim, J., Lee, D.-Y., Kim, S.-R., and Cho, K.-J. (2015). “A self-deployable origami structure with locking mechanism induced by buckling effect,” in 2015 IEEE international Conference on robotics and automation (ICRA) (IEEE), 3166–3171.
Kim, K., Guo, Y., Bae, J., Choi, S., Song, H. Y., Park, S., et al. (2021). 4d printing of hygroscopic liquid crystal elastomer actuators. Small 17 (23), 2100910. doi:10.1002/smll.202100910
Kofod, G., Sommer-Larsen, P., Kornbluh, R., and Pelrine, R. (2003). Actuation response of polyacrylate dielectric elastomers. J. Intelligent Material Syst. Struct. 14 (12), 787–793. doi:10.1177/104538903039260
Kofod, G., Wirges, W., Paajanen, M., and Bauer, S. (2007). Energy minimization for self-organized structure formation and actuation. Appl. Phys. Lett. 90 (8), 081916. doi:10.1063/1.2695785
Koh, J. S., and Cho, K. J. (2012). Omega-shaped inchworm-inspired crawling robot with large-index-and-pitch (lip) sma spring actuators. IEEE/ASME Trans. Mechatronics 18 (2), 419–429. doi:10.1109/tmech.2012.2211033
Kortman, V. G., de Vries, E., Jovanova, J., and Sakes, A. (2024). Unlocking versatility: magnetic-actuated deployable suction gripper for complex surface handling. Soft Robot. 11, 1020–1031. doi:10.1089/soro.2023.0250
Kuo, J., Huang, H., Tung, S., and Yang, Y. J. (2014). A hydrogel-based intravascular microgripper manipulated using magnetic fields. Sensors Actuators A Phys. 211, 121–130. doi:10.1016/j.sna.2014.02.028
Laschi, C., Cianchetti, M., Mazzolai, B., Margheri, L., Follador, M., and Dario, P. (2012). Soft robot arm inspired by the octopus. Adv. Robot. 26 (7), 709–727. doi:10.1163/156855312x626343
Lau, G., Heng, K., Ahmed, A., and Shrestha, M. (2017). Dielectric elastomer fingers for versatile grasping and nimble pinching. Appl. Phys. Lett. 110 (18), 182906. doi:10.1063/1.4983036
Leclerc, J., Zhao, H., Bao, D., and Becker, A. T. (2020). In vitro design investigation of a rotating helical magnetic swimmer for combined 3-d navigation and blood clot removal. IEEE Trans. Robotics 36 (3), 975–982. doi:10.1109/tro.2020.2988636
Lee, J., and Rodrigue, H. (2019). Origami-based vacuum pneumatic artificial muscles with large contraction ratios. Soft Robot. 6 (1), 109–117. doi:10.1089/soro.2018.0063
Lee, J. G., and Rodrigue, H. (2024). Design and analysis of reconfigurable origami-based vacuum pneumatic artificial muscles for versatile robotic system. New York, NY: Soft Robotics Journal.
Lee, J., Chung, Y., and Rodrigue, H. (2019a). Application of SMA spring tendons for improved grasping performance. Smart Mater. Struct. 28 (3), 035006. doi:10.1088/1361-665x/aaf5f4
Lee, J., Chung, Y., and Rodrigue, H. (2019b). Long shape memory alloy tendon-based soft robotic actuators and implementation as a soft gripper. Sci. Rep. 9 (1), 11251. doi:10.1038/s41598-019-47794-1
Lee, Y., Song, W., and Sun, J. (2020). Hydrogel soft robotics. Mater. Today Phys. 15, 100258. doi:10.1016/j.mtphys.2020.100258
Lendlein, A., and Kelch, S. (2002). Shape-memory polymers. Angew. Chem. Int. Ed. 41 (12), 2034–2057. doi:10.1002/1521-3773(20020617)41:12<2034::aid-anie2034>3.0.co;2-m
Li, G., Wu, J., Wang, B., Yan, S., Zhang, K., Ding, J., et al. (2015). Self-healing supramolecular self-assembled hydrogels based on poly(l-glutamic acid). Biomacromolecules 16 (11), 3508–3518. doi:10.1021/acs.biomac.5b01287
Li, H., Go, G., Ko, S., Park, J. O., and Park, S. (2016). Magnetic actuated ph-responsive hydrogel-based soft micro-robot for targeted drug delivery. Smart Mater. Struct. 25 (2), 027001. doi:10.1088/0964-1726/25/2/027001
Li, S., Vogt, D., Rus, D., and Wood, R. J. (2017a). Fluid-driven origami-inspired artificial muscles. Proc. Natl. Acad. Sci. 114 (50), 13132–13137. doi:10.1073/pnas.1713450114
Li, Y., Chen, Y., Yang, Y., and Wei, Y. (2017b). Passive particle jamming and its stiffening of soft robotic grippers. IEEE Trans. Robotics 33 (2), 446–455. doi:10.1109/tro.2016.2636899
Li, J., Liu, L., Liu, Y., and Leng, J. (2019a). Dielectric elastomer spring-roll bending actuators: applications in soft robotics and design. Soft Robot. 6 (1), 69–81. doi:10.1089/soro.2018.0037
Li, X., Li, M., Xu, J., You, J., Yang, Z., and Li, C. (2019b). Evaporation-induced sintering of liquid metal droplets with biological nanofibrils for flexible conductivity and responsive actuation. Nat. Commun. 10 (1), 3514. doi:10.1038/s41467-019-11466-5
Li, X., Fan, D., Sun, Y., Xu, L., Li, D., Sun, B., Nong, S., et al. (2024a). Porous magnetic soft grippers for fast and gentle grasping of delicate living objects. Adv. Mater. 36, 2409173. doi:10.1002/adma.202409173
Li, X., Rao, D., Zhang, M., Xue, Y., Cao, X., Yin, S., et al. (2024b). A jelly-like artificial muscle for an untethered underwater robot. Cell. Rep. Phys. Sci. 5 (5), 101957. doi:10.1016/j.xcrp.2024.101957
Li, N., Yuan, X., Li, Y., Zhang, G., Yang, Q., Zhou, Y., et al. (2024c). Bioinspired liquid metal based soft humanoid robots. Adv. Mater. 36, 2404330. doi:10.1002/adma.202404330
Li, S., Wang, T., Chen, S., Li, Y., Zou, Y., Cao, B., et al. (2024d). Compressive properties and biocompatibility of additively manufactured lattice structures by using bioactive materials. Thin-Walled Struct. 205, 112469. doi:10.1016/j.tws.2024.112469
Li, S., Chen, R., Xu, W., Zhang, C., Liu, G., Wang, Q., et al. (2025). Peek-based orthopedic composites and structures for orthopedic repair: a review. Polym. Compos., pc.70025. doi:10.1002/pc.71025
Li, C., Zhu, H., Jin, X., and You, Z. (2020). Universal smp gripper with massive and selective capabilities for multiscaled, arbitrarily shaped objects. Sci. Adv. 6 (7), eaay5120. doi:10.1126/sciadv.aay5120
Liao, J., and Majidi, C. (2022). Muscle-inspired linear actuators by electrochemical oxidation of liquid metal bridges. Adv. Sci. 9 (26), 2201963. doi:10.1002/advs.202201963
Lin, H., Leisk, G., and Trimmer, B. (2011). Goqbot: a caterpillar-inspired soft-bodied rolling robot. Bioinspiration & biomimetics 6 (2), 026007. doi:10.1088/1748-3182/6/2/026007
Lin, C., Xin, X., Tian, L., Zhang, D., Liu, L., Liu, Y., et al. (2024). Thermal-magnetic-and light-responsive 4d printed smp composites with multiple shape memory effects and their promising applications. Compos. Part B Eng. 274, 111257. doi:10.1016/j.compositesb.2024.111257
Linghu, C., Liu, Y., Tan, Y. Y., Sing, J. H. M., Tang, Y., Zhou, A., et al. (2023). Overcoming the adhesion paradox and switchability conflict on rough surfaces with shape-memory polymers. Proc. Natl. Acad. Sci. 120 (13), e2221049120. doi:10.1073/pnas.2221049120
Linghu, C., Mu, T., Zhao, W., Liu, Y., Hsia, K. J., Leng, J., et al. (2024). Advancing smart dry adhesives with shape memory polymers. Int. J. Smart Nano Mater. 16, 103–143. doi:10.1080/19475411.2024.2439954
Linghu, C., Liu, Y., Yang, X., Chen, Z., Feng, J., Zhang, Y., et al. (2025). Versatile adhesive skin enhances robotic interactions with the environment. Sci. Adv. 11 (3), eadt4765. doi:10.1126/sciadv.adt4765
Liu, S., and Wang, H. (2024). A wireless 6-dof pose tracking system using a triaxially anisotropic soft magnet. IEEE/ASME Trans. Mechatronics 30, 1224–1235. doi:10.1109/tmech.2024.3422391
Liu, D., Liu, W., and Gong, F. (1995). Engineering application of fe-based shape memory alloy on connecting pipe line. J. de Physique IV 5 (C8), 1241–1246. doi:10.1051/jp4/1995581241
Liu, Y., Xu, B., Sun, S., Wei, J., Wu, L., and Yu, Y. (2017a). Humidity-and photo-induced mechanical actuation of cross-linked liquid crystal polymers. Adv. Mater 29 (9), 1604792. doi:10.1002/adma.201604792
Liu, X., Tang, T., Tham, E., Yuk, H., Lin, S., Lu, T. K., et al. (2017b). Stretchable living materials and devices with hydrogel–elastomer hybrids hosting programmed cells. Proc. Natl. Acad. Sci. 114 (9), 2200–2205. doi:10.1073/pnas.1618307114
Liu, X., Liu, J., Lin, S., and Zhao, X. (2020a). Hydrogel machines. Mater. Today 36, 102–124. doi:10.1016/j.mattod.2019.12.026
Liu, M., Hao, L., Zhang, W., and Zhao, Z. (2020b). A novel design of shape-memory alloy-based soft robotic gripper with variable stiffness. Int. J. Adv. Robotic Syst. 17 (1), 1729881420907813. doi:10.1177/1729881420907813
Liu, Y., Luo, K., Wang, S., Song, X., Zhang, Z., Tian, Q., et al. (2023a). A soft and bistable gripper with adjustable energy barrier for fast capture in space. Soft Robot. 10 (1), 77–87. doi:10.1089/soro.2021.0147
Liu, J., Zhou, Y., Lu, J., Cai, R., Zhao, T., Chen, Y., et al. (2023b). Injectable, tough and adhesive zwitterionic hydrogels for 3D-printed wearable strain sensors. Chem. Eng. J. 475, 146340. doi:10.1016/j.cej.2023.146340
Liu, H., Chu, H., Yuan, H., Li, D., Deng, W., Fu, Z., et al. (2024a). Bioinspired multifunctional self-sensing actuated gradient hydrogel for soft-hard robot remote interaction. Nano-Micro Lett. 16 (69), 69. doi:10.1007/s40820-023-01287-z
Liu, X., Chen, S., Wang, B., Tan, X., and Yu, L. (2024b). A compact quasi-zero-stiffness mechanical metamaterial based on truncated conical shells. Int. J. Mech. Sci. 195, 106409. doi:10.1016/j.ijmecsci.2024.106409
Liu, X., Chen, S., Wang, B., Tan, X., Cao, B., and Yu, L. (2025a). A mechanical metamaterial with real-time tunable bandgap based on pneumatic actuation. Int. J. Mech. Sci. 289, 110045. doi:10.1016/j.ijmecsci.2025.110045
Liu, Y., Han, L., Lv, S., Jiang, T., Duan, M., Guo, H., et al. (2025b). Emotional and directional enabled programmable flexible haptic interface for enhanced cognition in disabled community. Research 8, 0714. doi:10.34133/research.0714
Lobo, P., Almeida, J., and Guerreiro, L. (2015). Shape memory alloys behaviour: a review. Procedia Eng. 114, 776–783. doi:10.1016/j.proeng.2015.08.025
Lotz, P., Matysek, M., and Schlaak, H. (2011). Fabrication and application of miniaturized dielectric elastomer stack actuators. IEEE-ASME Trans. Mechatronics 16 (1), 58–66. doi:10.1109/tmech.2010.2090164
Lu, H., Liu, Y., Gou, J., Leng, J., and Du, S. (2010). Electrical properties and shape-memory behavior of self-assembled carbon nanofiber nanopaper incorporated with shape-memory polymer. Smart Mater. Struct. 19 (7), 075021. doi:10.1088/0964-1726/19/7/075021
Lu, H., Lei, M., Zhao, C., Yao, Y., Gou, J., Hui, D., et al. (2015). Controlling au electrode patterns for simultaneously monitoring electrical actuation and shape recovery in shape memory polymer. Compos. Part B Eng. 80, 37–42. doi:10.1016/j.compositesb.2015.05.039
Lu, X., Guo, S., Tong, X., Xia, H., and Zhao, Y. (2017). Tunable photocontrolled motions using stored strain energy in malleable azobenzene liquid crystalline polymer actuators. Adv. Mater. 29 (28), 1606467. doi:10.1002/adma.201606467
Lucarini, S., Hossain, M., and Garcia-Gonzalez, D. (2022). Recent advances in hard-magnetic soft composites: synthesis, characterisation, computational modelling, and applications. Compos. Struct. 279, 114800. doi:10.1016/j.compstruct.2021.114800
Luo, L., Zhang, F., Wang, L., Liu, Y., and Leng, J. (2024). Recent advances in shape memory polymers: multifunctional materials, multiscale structures, and applications. Adv. Funct. Mater. 34 (14), 2312036. doi:10.1002/adfm.202312036
Lyu, P., Astam, M., Sánchez-Somolinos, C., and Liu, D. (2022). Robotic pick-and-place operations in multifunctional liquid crystal elastomers. Adv. Intell. Syst. 4 (12), 2200280. doi:10.1002/aisy.202200280
Ma, R., and Dollar, A. (2017). Yale openhand project: optimizing open-source hand designs for ease of fabrication and adoption. IEEE Robotics & Automation Mag. 24 (1), 32–40. doi:10.1109/mra.2016.2639034
Ma, Z., and Sameoto, D. (2022). A review of electrically driven soft actuators for soft robotics. Micromachines 13 (11), 1881. doi:10.3390/mi13111881
Ma, Y., Gao, J., Guan, T., Tao, Y., Guo, M., and Liu, J. (2025). Chemotaxic biomimetic liquid metallic leukocytes. Matter 8, 101991. doi:10.1016/j.matt.2025.101991
Manti, M., Hassan, T., Passetti, G., D'Elia, N., Laschi, C., and Cianchetti, M. (2015). A bioinspired soft robotic gripper for adaptable and effective grasping. Soft Robot. 2 (3), 107–116. doi:10.1089/soro.2015.0009
Mao, S., Dong, E., Jin, H., Xu, M., Zhang, S., Yang, J., et al. (2014). Gait study and pattern generation of a starfish-like soft robot with flexible rays actuated by smas. J. Bionic Eng. 11 (3), 400–411. doi:10.1016/s1672-6529(14)60053-6
Masjosthusmann, L., Richter, M., Makushko, P., Makarov, D., and Misra, S. (2024). Miniaturized variable stiffness gripper locally actuated by magnetic fields. Adv. Intell. Syst. 6, 2400037. doi:10.1002/aisy.202400037
McDonald, K., Rendos, A., Woodman, S., Brown, K. A., and Ranzani, T. (2020). Magnetorheological fluid-based flow control for soft robots. Adv. Intell. Syst. 2 (11), 2000139. doi:10.1002/aisy.202000139
Meng, C., Xu, W., Li, H., Zhang, H., and Xu, D. (2017). A new design of cellular soft continuum manipulator based on beehive-inspired modular structure. Int. J. Adv. Robotic Syst. 14 (3), 172988141770738. doi:10.1177/1729881417707380
Miettinen, J., Frilund, P., Vuorinen, I., Kuosmanen, P., and Kiviluoma, P. (2019). Granular jamming based robotic gripper for heavy objects; pp. 421–428. Proc. Est. Acad. Sci. 68 (4), 421–428. doi:10.3176/proc.2019.4.12
Navas, E., Fernández, R., Armada, M., and Gonzalez-de-Santos, P. (2021). Diaphragm-type pneumatic-driven soft grippers for precision harvesting. Agronomy 11 (9), 1727. doi:10.3390/agronomy11091727
Navas, E., Fernández, R., Sepúlveda, D., Armada, M., and Gonzalez-de-Santos, P. (2021). Soft grippers for automatic crop harvesting: a review. Sensors 21 (8), 2689. doi:10.3390/s21082689
Otsuka, K., and Ren, X. (1999). Recent developments in the research of shape memory alloys. Intermetallics 7 (5), 511–528. doi:10.1016/s0966-9795(98)00070-3
Oyen, M. (2014). Mechanical characterisation of hydrogel materials. Int. Mater. Rev. 59 (1), 44–59. doi:10.1179/1743280413y.0000000022
O’Halloran, A., O’malley, F., and McHugh, P. (2008). A review on dielectric elastomer actuators, technology, applications, and challenges. J. Appl. Phys. 104 (7), 071101. doi:10.1063/1.2981642
Phillips, B., Becker, K., Kurumaya, S., Galloway, K. C., Whittredge, G., Vogt, D. M., et al. (2018). A dexterous, glove-based teleoperable low-power soft robotic arm for delicate deep-sea biological exploration. Sci. Rep. 8 (1), 14779. doi:10.1038/s41598-018-33138-y
Pacchierotti, C., Ongaro, F., Van Den Brink, F., Yoon, C., Prattichizzo, D., Gracias, D. H., et al. (2017). Steering and control of miniaturized untethered soft magnetic grippers with haptic assistance. IEEE Trans. Automation Sci. Eng. 15 (1), 290–306. doi:10.1109/tase.2016.2635106
Pang, H., Pei, L., Xu, J., Cao, S., Wang, Y., and Gong, X. (2020). Magnetically tunable adhesion of composite pads with magnetorheological polymer gel cores. Compos. Sci. Technol. 192, 108115. doi:10.1016/j.compscitech.2020.108115
Park, T., Kim, K., Oh, S., and Cha, Y. (2020). Electrohydraulic actuator for a soft gripper. Soft Robot. 7 (1), 68–75. doi:10.1089/soro.2019.0009
Peppas, N., and Khare, A. (1993). Preparation, structure and diffusional behavior of hydrogels in controlled release. Adv. Drug Deliv. Rev. 11 (1-2), 1–35. doi:10.1016/0169-409x(93)90025-y
Pilz da Cunha, M., Foelen, Y., van Raak, R., Murphy, J. N., Engels, T. A. P., Debije, M. G., et al. (2019). An untethered magnetic-and light-responsive rotary gripper: shedding light on photoresponsive liquid crystal actuators. Adv. Opt. Mater. 7 (7), 1801643. doi:10.1002/adom.201801643
Piskarev, Y., Devincenti, A., Ramachandran, V., Bourban, P. E., Dickey, M. D., Shintake, J., et al. (2023). A soft gripper with granular jamming and electroadhesive properties. Adv. Intell. Syst. 5 (6), 2200409. doi:10.1002/aisy.202200409
Purnendu, , Acome, E., Keplinger, C., Gross, M. D., Bruns, C., and Leithinger, D. (2021a). “Soft electrohydraulic actuators for origami inspired shape-changing interfaces,” in Extended abstracts of the 2021 CHI Conference on human factors in Computing systems, 1–6. doi:10.1145/3411763.3451590
Purnendu, , Novack, S. M., Acome, E., Keplinger, C., Alistar, M., Gross, M. D., et al. (2021b). “Electriflow: soft electrohydraulic building blocks for prototyping shape-changing interfaces,” in Proceedings of the 2021 ACM designing interactive systems Conference, 1280–1290.
Qin, H., Zhang, T., Li, N., Cong, H. P., and Yu, S. H. (2019). Anisotropic and self-healing hydrogels with multi-responsive actuating capability. Nat. Commun. 10 (1), 2202–2211. doi:10.1038/s41467-019-10243-8
Qin, Q., Liu, X., Man, J., Cao, B., Wang, B., and Tan, X. (2025). Hierarchical negative stiffness mechanical metamaterials. Smart Mater. Struct. 34, 065008. doi:10.1088/1361-665X/addf24
Qing, H., Chi, Y., Hong, Y., Zhao, Y., Qi, F., Li, Y., et al. (2024). Fully 3d-printed miniature soft hydraulic actuators with shape memory effect for morphing and manipulation. Adv. Mater. 36 (36), 2402517. doi:10.1002/adma.202402517
Qu, L., Xiaoyuan, W., Jiaming, L., Weifeng, W., and Xiaojun, Y. (2022). A review of research on the application of shape memory alloys in aerospace. J. Aerosp. Power 37 (10), 2127–2141. doi:10.13224/j.cnki.jasp.20220493
Qu, J., Yuan, Q., Li, Z., Wang, Z., Xu, F., Fan, Q., et al. (2023). All-in-one strain-triboelectric sensors based on environment-friendly ionic hydrogel for wearable sensing and underwater soft robotic grasping. Nano Energy 111, 108387. doi:10.1016/j.nanoen.2023.108387
Qu, J., Yu, Z., Tang, W., Xu, Y., Mao, B., and Zhou, K. (2024). Advanced technologies and applications of robotic soft grippers. Adv. Mater. Technol. 9 (11), 2301004. doi:10.1002/admt.202301004
Rankin, P., Horvath, A., and Klingenberg, D. (1999). Magnetorheology in viscoplastic media. Rheol. Acta 38 (5), 471–477. doi:10.1007/s003970050198
Renda, F., Cianchetti, M., Giorelli, M., Arienti, A., and Laschi, C. (2012). A 3d steady-state model of a tendon-driven continuum soft manipulator inspired by the octopus arm. Bioinspiration & Biomimetics 7 (2), 025006. doi:10.1088/1748-3182/7/2/025006
Robot strategy (2024). J. R. A. (JARA), Robot strategy. Available online at: https://www.jara.jp/e/various/strategy/index.html.
Rodrigue, H., Wei, W., Bhandari, B., and Ahn, S. H. (2015). Fabrication of wrist-like sma-based actuator by double smart soft composite casting. Smart Mater. Struct. 24 (12), 125003. doi:10.1088/0964-1726/24/12/125003
Rodrigue, H., Wang, W., Kim, D., and Ahn, S. H. (2017a). Curved shape memory alloy-based soft actuators and application to soft gripper. Compos. Struct. 176, 398–406. doi:10.1016/j.compstruct.2017.05.056
Rodrigue, H., Wang, W., Han, M., Kim, T. J., and Ahn, S. H. (2017b). An overview of shape memory alloy-coupled actuators and robots. Soft Robot. 4 (1), 3–15. doi:10.1089/soro.2016.0008
Romasanta, L., López-Manchado, M., and Verdejo, R. (2015). Increasing the performance of dielectric elastomer actuators: a review from the materials perspective. Prog. Polym. Sci. 51, 188–211. doi:10.1016/j.progpolymsci.2015.08.002
Rus, D., and Tolley, M. T. (2015). Design, fabrication and control of soft robots. Nature 521 (7553), 467–475. doi:10.1038/nature14543
Sangian, D., Naficy, S., Spinks, G., and Tondu, B. (2015). The effect of geometry and material properties on the performance of a small hydraulic mckibben muscle system. Sensors Actuators A Phys. 234, 150–157. doi:10.1016/j.sna.2015.08.025
Schmalz (2024). Finger grippers - mgrip. Available online at: https://www.schmalz.com/en-us/vacuum-technology-for-automation/vacuum-components/area-gripping-systems-and-end-effectors/finger-grippers/finger-grippers-mgrip/.
Schönfeld, D., Chalissery, D., Wenz, F., Specht, M., Eberl, C., and Pretsch, T. (2021). Actuating shape memory polymer for thermoresponsive soft robotic gripper and programmable materials. Molecules 26 (3), 522. doi:10.3390/molecules26030522
Seo, W., Haines, C. S., Kim, H., Park, C. -L., Kim, S. H., Park, S., et al. (2024). Azobenzene-functionalized semicrystalline liquid crystal elastomer springs for underwater soft robotic actuators. Small 21, 2406493. doi:10.1002/smll.202406493
Shao, G., Ware, H. T., Huang, J., Hai, R., Li, L., and Sun, C. (2021). 3d printed magnetically-actuating micro-gripper operates in air and water. Addit. Manuf. 38, 101834. doi:10.1016/j.addma.2020.101834
Sharma, N., Jangra, K. K., and Raj, T. (2018). Fabrication of niti alloy: a review. Proc. Institution Mech. Eng. Part L J. Mater. Des. Appl. 232 (3), 250–269. doi:10.1177/1464420715622494
Shen, Y., Jin, D., Fu, M., Liu, S., Xu, Z., Cao, Q., et al. (2023). Reactive wetting enabled anchoring of non-wettable iron oxide in liquid metal for miniature soft robot. Nat. Commun. 14 (1), 6276. doi:10.1038/s41467-023-41920-4
Sheng, L., Zhang, J., and Liu, J. (2014). Diverse transformations of liquid metals between different morphologies. Adv. Mater. 26 (34), 6036–6042. doi:10.1002/adma.201400843
Shian, S., Bertoldi, K., and Clarke, D. (2015). Dielectric elastomer based “grippers” for soft robotics. Adv. Mater. 27, 6814–6819. doi:10.1002/adma.201503078
Shintake, J., Schubert, B., Rosset, S., Shea, H., and Floreano, D. (2015). Variable stiffness actuator for soft robotics using dielectric elastomer and low-melting-point alloy. IEEE/RSJ International Conference on Intelligent Robots and Systems IROS, 1097–1102.
Shintake, J., Rosset, S., Schubert, B., Floreano, D., and Shea, H. (2016). Versatile soft grippers with intrinsic electroadhesion based on multifunctional polymer actuators. Adv. Mater. 28 (2), 231–238. doi:10.1002/adma.201504264
Shintake, J., Cacucciolo, V., Floreano, D., and Shea, H. (2018). Soft robotic grippers. Adv. Mater. 30 (29), 1707035. doi:10.1002/adma.201707035
Silveyra, J., Ferrara, E., Huber, D., and Monson, T. C. (2018). Soft magnetic materials for a sustainable and electrified world. Science 362 (6413), eaao0195. doi:10.1126/science.aao0195
Sitti, M., and Wiersma, D. (2020). Pros and cons: magnetic versus optical microrobots. Adv. Mater. 32 (20), 1906766. doi:10.1002/adma.201906766
Skomski, R., Manchanda, P., Kumar, P., Balamurugan, B., Kashyap, A., and Sellmyer, D. J. (2013). Predicting the future of permanent-magnet materials. IEEE Trans. Magnetics 49 (7), 3215–3220. doi:10.1109/tmag.2013.2248139
Son, C., Jeong, S., Lee, S., Ferreira, P. M., and Kim, S. (2023). Tunable adhesion of shape memory polymer dry adhesive soft robotic gripper via stiffness control. Robotics 12 (2), 59. doi:10.3390/robotics12020059
Spontak, R., and Patel, N. (2000). Thermoplastic elastomers: fundamentals and applications. Curr. Opin. Colloid & Interface Sci. 5 (5-6), 333–340. doi:10.1016/s1359-0294(00)00070-4
Stiufiuc, G., and Stiufiuc, R. (2024). Magnetic nanoparticles: synthesis, characterization, and their use in biomedical field. Appl. Sci. 14 (1623), 1623. doi:10.3390/app14041623
Stuart, H., Wang, S., Khatib, O., and Cutkosky, M. R. (2017). The ocean one hands: an adaptive design for robust marine manipulation. Int. J. Robotics Res. 36 (2), 150–166. doi:10.1177/0278364917694723
Su, Z. (2002). The surface energy balance system (sebs) for estimation of turbulent heat fluxes. Hydrology Earth Syst. Sci. 6 (1), 85–100. doi:10.5194/hess-6-85-2002
Sun, J., Zhao, X., Illeperuma, W., Chaudhuri, O., Oh, K. H., Mooney, D. J., et al. (2012). Highly stretchable and tough hydrogels. Nature 489 (7414), 133–136. doi:10.1038/nature11409
Sun, J., Zhao, X., Illeperuma, W., and Ji, H. F. (2019). Applications of highly stretchable and tough hydrogels. Polymers 11 (11), 1773. doi:10.3390/polym11111773
Sun, Q., Tan, X., Ding, M., Cao, B., and Iwamoto, T. (2024a). A review of additively manufactured iron-based shape memory alloys. Crystals 14, 773. doi:10.3390/cryst14090773
Sun, Q., Cao, B., Iwamoto, T., and Kaneko, Y. (2024b). An improvement of shape memory effect in fe-mn-si shape memory alloy by training process under impact tensile loading. Mater. Sci. Eng. A 915, 147185. doi:10.1016/j.msea.2024.147185
Sun, Q., Cao, B., Iwamoto, T., Tan, X., and Ding, M. (2025). Martensitic transformation and shape memory behavior of fe-mn-si based shape memory alloy under quasi-static and impact compressive loading. J. Alloys Compd. 1034, 181346. doi:10.1016/j.jallcom.2025.181346
Suo, Z. (2010). Theory of dielectric elastomers. Acta Mech. Solida Sin. 23 (6), 549–578. doi:10.1016/s0894-9166(11)60004-9
Suzumori, K., and Faudzi, A. (2018). Trends in hydraulic actuators and components in legged and tough robots: a review. Adv. Robot. 32 (9), 458–476. doi:10.1080/01691864.2018.1455606
Tabrizikahou, A., Kuczma, M., Nowotarski, P., Kwiatek, M., and Javanmardi, A. (2021). Sustainability of Civil structures through the application of smart materials: a review. A Rev. Mater. 14 (17), 4824. doi:10.3390/ma14174824
Tai, K., El-Sayed, A., Shahriari, M., Biglarbegian, M., and Mahmud, S. (2016). State of the art robotic grippers and applications. Robotics 5 (2), 11. doi:10.3390/robotics5020011
Tan, C., Xu, P., Li, P., and Yu, H. (2023). Research status of modeling and control methods of rope-driven flexible manipulator. Inf. Control 52 (3), 277–291. doi:10.13976/j.cnki.xk.2023.2033
Tan, X., Li, Y., Wang, L., Yao, K., Ji, Q., Wang, B., et al. (2023). Bioinspired flexible and programmable negative stiffness mechanical metamaterials. Adv. Intell. Syst. 5 (6), 2200400. doi:10.1002/aisy.202200400
Tan, X., Cao, B., Liu, X., Zhu, S., Chen, S., Kadic, M., et al. (2024a). Negative stiffness mechanical metamaterials: a review. Smart Mater. Struct. 34, 013001. doi:10.1088/1361-665x/ad97fe
Tan, X., Cao, B., Liu, W., Ji, C., Wang, B., and Li, S. (2024b). Odd mechanical metamaterials with simultaneously expanding or contracting under both compression and tension. Thin-Walled Struct. 203, 112225. doi:10.1016/j.tws.2024.112225
Tang, J., Yin, Q., Qiao, Y., and Wang, T. (2019). Shape morphing of hydrogels in alternating magnetic field. ACS Appl. Mater. & Interfaces 11 (23), 21194–21200. doi:10.1021/acsami.9b05742
Taylor, J. A., and Kier, W. (2003). Switching skeletons: hydrostatic support in molting crabs. Science 301 (5630), 209–210. doi:10.1126/science.1085987
Tech, S. R. (2024). Company brief. Available online at: https://softrobottech.com/web/zh/com/brief.
Terrile, S., Argüelles, M., and Barrientos, A. (2021). Comparison of different technologies for soft robotics grippers. Sensors 21 (9), 3253. doi:10.3390/s21093253
Tondu, B., Emirkhanian, R., Mathé, S., and Ricard, A. (2009). A ph-activated artificial muscle using the mckibben-type braided structure. Sensors Actuators A Phys. 150 (1), 124–130. doi:10.1016/j.sna.2008.12.011
Toyoda, R., Yamada, Y., Mao, Z., Kuwajima, Y., Sugisaki, T., Senevirathna, A. M. N. N., et al. (2024). A stretchable jamming gripper grasping flat plates. IEEE Access 12, 48764–48773. doi:10.1109/access.2024.3383919
Veksler, Y., Ben-Abu, E., and Gat, A. (2024). Fluid-driven director-field design enables versatile deployment of multistable structures. Adv. Intell. Syst. 6, 2400179. doi:10.1002/aisy.202400179
Villanueva, A., Smith, C., and Priya, S. (2011). A biomimetic robotic jellyfish (robojelly) actuated by shape memory alloy composite actuators. Bioinspiration & Biomimetics 6 (3), 036004. doi:10.1088/1748-3182/6/3/036004
Vogt, D., Becker, K., Phillips, B., Graule, M. A., Rotjan, R. D., Shank, T. M., et al. (2018). Shipboard design and fabrication of custom 3d-printed soft robotic manipulators for the investigation of delicate deep-sea organisms. PloS One 13 (8), e0200386. doi:10.1371/journal.pone.0200386
Wang, W., and Ahn, S. (2017). Shape memory alloy-based soft gripper with variable stiffness for compliant and effective grasping. Soft Robot. 4 (4), 379–389. doi:10.1089/soro.2016.0081
Wang, K., Jia, Y.-G., and Zhu, X. (2017). Two-way reversible shape memory polymers made of cross-linked cocrystallizable random copolymers with tunable actuation temperatures. Macromolecules 50 (21), 8570–8579. doi:10.1021/acs.macromol.7b01815
Wang, Y., Gupta, U., Parulekar, N., and Zhu, J. (2019a). A soft gripper of fast speed and low energy consumption. Sci. China Technol. Sci. 62, 31–38. doi:10.1007/s11431-018-9358-2
Wang, Z., Li, K., He, Q., and Cai, S. (2019b). A light-powered ultralight tensegrity robot with high deformability and load capacity. Adv. Mater. 31 (7), 1806849. doi:10.1002/adma.201806849
Wang, H., Yao, Y., Wang, X., Sheng, L., Yang, X. H., Cui, Y., et al. (2019c). Large-magnitude transformable liquid-metal composites. ACS Omega 4 (1), 2311–2319. doi:10.1021/acsomega.8b03466
Wang, H., Chen, S., Li, H., Chen, X., Cheng, J., Shao, Y., et al. (2021). A liquid gripper based on phase transitional metallic ferrofluid. Adv. Funct. Mater. 31 (32), 2100274. doi:10.1002/adfm.202100274
Wang, Z., Freris, N., and Wei, X. (2024a). Spirobs: logarithmic spiral-shaped robots for versatile grasping across scales. Cambridge, Massachusetts, USA: Device Journal, Cell Press.
Wang, Y., Wang, Y., Mushtaq, R. T., and Wei, Q. (2024b). Advancements in soft robotics: a comprehensive review on actuation methods, materials, and applications. Polymers 16 (8), 1087. doi:10.3390/polym16081087
Watanabe, S., Ikemoto, Y., and Shintake, J. (2023). Modeling and characterization of tensegrity structures integrating dielectric elastomer actuators. Adv. Eng. Mater. 25 (8), 2201471. doi:10.1002/adem.202201471
Wei, Y., Chen, Y., Ren, T., Chen, Q., Yan, C., Yang, Y., et al. (2016). A novel, variable stiffness robotic gripper based on integrated soft actuating and particle jamming. Soft Robot. 3 (3), 134–143. doi:10.1089/soro.2016.0027
White, T., and Broer, D. (2015). Programmable and adaptive mechanics with liquid crystal polymer networks and elastomers. Nat. Mater. 14 (11), 1087–1098. doi:10.1038/nmat4433
Wolf, M., Salieb-Beugelaar, G., and Hunziker, P. (2018). Pdms with designer functionalities–properties, modifications strategies, and applications. Prog. Polym. Sci. 83, 97–134. doi:10.1016/j.progpolymsci.2018.06.001
Wu, M., Zheng, X., Liu, R., Hou, N., Afridi, W. H., Afridi, R. H., et al. (2022a). Glowing sucker octopus (stauroteuthis syrtensis)-inspired soft robotic gripper for underwater self-adaptive grasping and sensing. Adv. Sci. 9 (17), 2104382. doi:10.1002/advs.202104382
Wu, B., Xue, Y., Ali, I., et al. (2022b). The dynamic mortise-and-tenon interlock assists hydrated soft robots toward off-road locomotion, 2022. Research, 0015.
Wu, M., Zhou, X., Zhang, J., Liu, L., Wang, S., Zhu, L., et al. (2024). Microfiber actuators with hot-pressing-programmable mechano-photothermal responses for electromagnetic perception. Adv. Mater. 36 (46), 2409606. doi:10.1002/adma.202409606
Wu, H., Han, Y., Chen, X., Lu, R., Zhuang, E., Wu, H., et al. (2025). Design, fabrication, and characterization of a novel crawling pneumatic soft robot. Automation 6, 7. doi:10.3390/automation6010007
Wyslocka, E., and Ulewicz, R. (2015). “Magnets: History, the current state and the future,” in Metal Conference: 24th international Conference on Metallurgy and materials at.
Xavier, M., Tawk, C., Zolfagharian, A., Pinskier, J., Howard, D., Young, T., et al. (2022). Soft pneumatic actuators: a review of design, fabrication, modeling, sensing, control and applications. IEEE Access 10, 59442–59485. doi:10.1109/access.2022.3179589
Xiao, Y., Jiang, Z., Tong, X., and Zhao, Y. (2019). Biomimetic locomotion of electrically powered “janus” soft robots using a liquid crystal polymer. Adv. Mater. 31 (36), 1903452. doi:10.1002/adma.201903452
Xiao, Y., Jiang, Z., and Zhao, Y. (2020). Liquid crystal polymer-based soft robots. Adv. Intell. Syst. 2 (12), 2000148. doi:10.1002/aisy.202000148
Xie, Z., Yuan, F., Liu, J., Tian, L., Chen, B., Fu, Z., et al. (2023). Octopus-inspired sensorized soft arm for environmental interaction. Sci. Robotics 8 (84), eadh7852. doi:10.1126/scirobotics.adh7852
Xiong, H., and Diao, X. (2019). A review of cable-driven rehabilitation devices. Disabil. Rehabilitation Assistive Technol. 15, 885–897. doi:10.1080/17483107.2019.1629110
Xu, T., Zhang, J., Salehizadeh, M., Onaizah, O., and Diller, E. (2019). Millimeter-scale flexible robots with programmable three-dimensional magnetization and motions. Sci. Robotics 4 (29), eaav4494. doi:10.1126/scirobotics.aav4494
Xu, S., Zhang, S., Lei, R., Liu, Y., Bu, W., Wei, X., et al. (2023). Fluid-driven and smart material-driven research for soft body robots. Prog. Nat. Sci. Mater. Int. 33 (4), 371–385. doi:10.1016/j.pnsc.2023.09.002
Xu, M., Liu, Y., Li, J., Xu, F., Huang, X., and Yue, X. (2024). Review of flexible robotic grippers, with a focus on grippers based on magnetorheological materials. Materials 17 (19), 4858. doi:10.3390/ma17194858
Yue, T., Si, W., Partridge, A., Yang, C., Conn, A. T., Bloomfield-Gadelha, H., et al. (2022). A contact-triggered adaptive soft suction cup. IEEE Robotics Automation Lett. 7 (2), 3600–3607. doi:10.1109/lra.2022.3147245
Yang, Y., Chen, Y., Wei, Y., and Li, Y. (2016). Novel design and three-dimensional printing of variable stiffness robotic grippers. J. Mech. Robotics 8 (6), 061010. doi:10.1115/1.4033728
Yang, H., Leow, W., Wang, T., Wang, J., Yu, J., He, K., et al. (2017). 3d printed photoresponsive devices based on shape memory composites. Adv. Mater. 29 (33), 1701627. doi:10.1002/adma.201701627
Yang, X., Zhou, Y., Zhao, H., Huang, W., Wang, Y., Hsia, K. J., et al. (2023a). Morphing matter: from mechanical principles to robotic applications. Soft Sci. 3 (4), 38. doi:10.20517/ss.2023.42
Yang, Y., Zhu, H., Liu, J., Wei, Z., Li, Y., and Zhou, J. (2023b). A novel variable stiffness and tunable bending shape soft robotic finger based on thermoresponsive polymers. IEEE Trans. Instrum. Meas. 72, 1–13. doi:10.1109/tim.2023.3276501
Yang, N., Gong, F., Ge, J., Wang, L., Wang, G., and Cheng, L. (2023c). Advances in responsive liquid metal composites for cancer therapy. Mater. Today Nano 21, 100285. doi:10.1016/j.mtnano.2022.100285
Yao, Y., and Liu, J. (2016). Liquid metal wheeled small vehicle for cargo delivery. RSC Adv. 6 (61), 56482–56488. doi:10.1039/c6ra10629c
Yi, L., Ding, Y., Yuan, B., Wang, L., Tian, L., Chen, C., et al. (2016). Breathing to harvest energy as a mechanism towards making a liquid metal beating heart. RSC Adv. 6 (97), 94692–94698. doi:10.1039/c6ra17486h
Youn, J.-H., Koh, J.-S., and Kyung, K.-U. (2024). Soft polymer-actuated compliant microgripper with adaptive vibration-controlled grasp and release. Soft Robot. 11 (4), 585–595. doi:10.1089/soro.2023.0027
Yuen, M., Bilodeau, R., and Kramer, R. (2016). Active variable stiffness fibers for multifunctional robotic fabrics. IEEE Robotics Automation Lett. 1 (2), 708–715. doi:10.1109/lra.2016.2519609
Yuk, H., Zhang, T., Lin, S., Parada, G. A., and Zhao, X. (2016). Tough bonding of hydrogels to diverse non-porous surfaces. Nat. Mater. 15 (2), 190–196. doi:10.1038/nmat4463
Yuk, H., Lin, S., Ma, C., Takaffoli, M., Fang, N. X., and Zhao, X. (2017). Hydraulic hydrogel actuators and robots optically and sonically camouflaged in water. Nat. Commun. 8 (1), 14230. doi:10.1038/ncomms14230
Zaidi, S., Maselli, M., Laschi, C., and Cianchetti, M. (2021). Actuation technologies for soft robot grippers and manipulators: a review. Curr. Robot. Rep. 2 (3), 355–369. doi:10.1007/s43154-021-00054-5
Zanotti, C., Giuliani, P., and Chrysanthou, A. (2012). Martensitic–austenitic phase transformation of ni–ti smas: thermal properties. Intermetallics 24, 106–114. doi:10.1016/j.intermet.2012.01.026
Ze, Q., Kuang, X., Wu, S., Wong, J., Montgomery, S. M., Zhang, R., et al. (2020). Magnetic shape memory polymers with integrated multifunctional shape manipulation. Adv. Mater. 32 (4), 1906657. doi:10.1002/adma.201906657
Zhang, J., Yao, Y., Sheng, L., and Liu, J. (2015). Self-fueled biomimetic liquid metal mollusk. Adv. Mater. 27 (16), 2648–2655. doi:10.1002/adma.201405438
Zhang, M., Li, G., Yang, X., Xiao, Y., Yang, T., Wong, T. W., et al. (2018). Artificial muscle driven soft hydraulic robot: electromechanical actuation and simplified modeling. Smart Mater. Struct. 27 (9), 095016. doi:10.1088/1361-665x/aacfe3
Zhang, Z., Li, X., Yu, X., Chai, H., Li, Y., Wu, H., et al. (2019a). Magnetic actuation bionic robotic gripper with bistable morphing structure. Compos. Struct. 229, 111422. doi:10.1016/j.compstruct.2019.111422
Zhang, W., Zhang, X., Ma, Z., Zhou, F., Zhu, J., and Yang, J. (2019b). Cartilage-inspired hydrogel strain sensors with ultrahigh toughness and fatigue resistance for human motion monitoring. J. Mater. Chem. A 7 (45), 25881–25890. doi:10.1039/C9TA09170J
Zhang, J., Ren, Z., Hu, W., Soon, R. H., Yasa, I. C., Liu, Z., et al. (2021). Voxelated three-dimensional miniature magnetic soft machines via multimaterial heterogeneous assembly. Sci. Robotics 6 (53), eabf0112. doi:10.1126/scirobotics.abf0112
Zhang, X., Liao, W., Wang, Y., and Yang, Z. (2023). Thermal-responsive liquid crystal elastomer foam-based compressible and omnidirectional gripper. Chemistry–An Asian J. 18 (15), e202300340. doi:10.1002/asia.202300340
Zhang, S., Li, Y., Zhang, H., Wang, G., Wei, H., Zhang, X., et al. (2021). Bioinspired conductive hydrogel with ultrahigh toughness and stable anti-swelling properties for articular cartilage replacement. ACS Mater. Lett. 3 (6), 723–729. doi:10.1021/acsmaterialslett.1c00203
Zhang, C., Chen, G., Zhang, K., Jin, B., Zhao, Q., and Xie, T. (2024). Repeatedly programmable liquid crystal dielectric elastomer with multimodal actuation. Adv. Mater. 36 (16), 2313078. doi:10.1002/adma.202313078
Zheng, W., An, N., Yang, J., Zhou, J., and Chen, Y. M. (2015). Tough al-alginate/poly (n-isopropylacrylamide) hydrogel with tunable lcst for soft robotics. ACS Appl. Mater. & Interfaces 7 (3), 1758–1764. doi:10.1021/am507339r
Zheng, J., Xiao, P., Le, X., Lu, W., Théato, P., Ma, C., et al. (2018). Mimosa inspired bilayer hydrogel actuator functioning in multi-environments. J. Mater. Chem. C 6 (6), 1320–1327. doi:10.1039/c7tc04879c
Zhou, L., Miller, M., Lu, P., Ke, L., Skomski, R., Dillon, H., et al. (2014). Architecture and magnetism of alnico. Acta Mater. 74, 224–233. doi:10.1016/j.actamat.2014.04.044
Zhou, J., Chen, X., Chang, U., Lu, J. T., Leung, C. C. Y., Chen, Y., et al. (2019). A soft-robotic approach to anthropomorphic robotic hand dexterity. IEEE Access 7, 101483–101495. doi:10.1109/access.2019.2929690
Zhou, L., Ye, J., Fu, J., Gao, Q., and He, Y. (2020). 4d printing of high-performance thermal-responsive liquid metal elastomers driven by embedded microliquid chambers. ACS Appl. Mater. & Interfaces 12 (10), 12068–12074. doi:10.1021/acsami.9b22433
Zhou, L., Ren, L., Chen, Y., Niu, S., and Han, Z. (2021a). Bio-inspired soft grippers based on impactive gripping. Adv. Sci. 8 (9), 2002017. doi:10.1002/advs.202002017
Zhou, Y., Liu, J., Yan, J., Guo, S., and Li, T. (2021b). Soft-contact acoustic microgripper based on a controllable gas–liquid interface for biomicromanipulations. Small 17 (49), 2104579. doi:10.1002/smll.202104579
Keywords: soft grippers, actuation methods, smart materials, future development, challenges and limitations
Citation: Zhang Y, Man J, Liu X, Li S, Cao B, Yu L and Tan X (2025) Soft robotic grippers: a review. Front. Mater. 12:1692206. doi: 10.3389/fmats.2025.1692206
Received: 25 August 2025; Accepted: 25 September 2025;
Published: 27 October 2025; Corrected: 30 October 2025.
Edited by:
Xuan Shouhu, University of Science and Technology of China, ChinaReviewed by:
Wang Yanmei, Yulin University, ChinaMin Sang, University of Science and Technology of China, China
Copyright © 2025 Zhang, Man, Liu, Li, Cao, Yu and Tan. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Xiaoang Liu, bGl1eGlhb2FuZ0BoZWJ1dC5lZHUuY24=; Shuai Li, bGlzaHVhaUBrdXN0LmVkdS5jbg==; Bo Cao, Ym9jYW9AbndwdS5lZHUuY24=; Liang Yu, bGlhbmcueXVAbndwdS5lZHUuY24=; Xiaojun Tan, eGlhb2p1bl90YW4xQDE2My5jb20=