1 Introduction
The rapid development of robotics and artificial intelligence has led to increasing deployment of agricultural robots for precision agricultural applications (Chebrolu et al., 2017; Su et al., 2021; Hu et al., 2022b). Simultaneous Localization and Mapping (SLAM) is a critical skills for robots, which builds the environmental map around the robot and localizes the robot on the map at the same time (Cadena et al., 2016). SLAM is also a prerequisite of many other tasks for robots, such as autonomous navigation (Ponnambalam et al., 2020) and path planning (Bonny and Kashkash, 2022). Various modalities of sensors are used to realize SLAM, so as to realize full automation of agricultural robots (Gupta and Fernando, 2022; Tourani et al., 2022). Among them, Visual Simultaneous Localization and Mapping (VSLAM) has gained tremendous attention due to the wide availability of camera and its cost effective nature (Matsuki et al., 2018; Campos et al., 2020). Many datasets have been proposed for VSLAM, such as KITTI dataset (Geiger et al., 2013) and TUM dataset (Schubert et al., 2018). These benchmark datasets are of key importance to make a fair comparison and validation of different VSLAM methods. Therefore, construction of a benchmark dataset captured in agricultural field for VSLAM is important for design and evaluation of VSLAM methods that are suitable for agricultural robots.
In recent years, the number of publicly available datasets in the field of robotic application in agricultural has gradually increased, attracting surging attention from researchers. Currently, agricultural datasets mostly focus on fruit detection (Gené-Mola et al., 2019), weed detection (Dos et al., 2017; Olsen et al., 2018) and obstacle avoidance applications (Pezzementi et al., 2018). Only few datasets are available for localization and navigation, and further processing of the data is lacking. Hansen et al. (2017) collected data from stereo camera, thermal camera, LIDAR, Inertial Measurement Unit (IMU), and GNSS in dynamic scenes, and added object labels and geographic coordinates to all static and moving obstacles. The dataset is primarily used for localization and obstacle detection of robots in agricultural field. Zujevs et al. (2021) proposed the first event-based vision dataset, recording data sequences in 12 different scenes in autumn, aiming to cover visual navigation tasks in different types of agricultural environments. The dataset is specifically designed for a special type of vision sensor, i.e. event camera. Chebrolu et al. (2017) presented a multi-sensor dataset for plant segmentation, localization and mapping in a sugar beet farm. The dataset consists of data captured by RGB-NIR camera, Kinect RGB and depth camera and RTK-GPS sensor, and is recorded continuously for three months. The RGB-NIR camera data is semantically annotated for pixel-wise classification and segmentation of sugar beet and weed. Pire et al. (2018) proposed a number of visually challenging soybean field scenarios captured by ZED stereo camera, including sunlight reflections, irregular terrain, and highly repetitive texture which is particularly challenging for loop closure. In addition, information such as IMU and wheel odometers were recorded for the evaluation of SLAM algorithms by the fusion of multiple sensors. The captured RTK-GPS serves as ground truth for robot trajectories. Aiming at the dynamic characteristics and change of plant features in agricultural environments, Dong et al. (2016) performed continuous recordings of a peanut field. A data association algorithm is designed to solve the problem of large appearance change caused by different time points and different angles. Lu and Young (2020) and Wang et al. (2022) provided a review on agricultural datasets for robotics.
Regarding VSLAM of agricultural robots in farms or fruit orchards, the situation is usually more challenging than the most general case, due to the semi-structured environment of farms and fruit orchards. Although the plants and trees are often planted in structured rows, VSLAM is still a challenging problem, because of the repetitive visual pattern which is observed by robots when driving along these rows. The repetitive visual pattern can severely damage the performance of VSLAM by introducing incorrect matching of visual feature points and incorrect loop closure. Classical VSLAM frameworks often use direct or semi-direct methods such as LSD-SLAM (Engel et al., 2014) and DSO (Matsuki et al., 2018), and indirect methods such as PTAM (Klein and Murray, 2007) and ORB-SLAM3 (Campos et al., 2020), to optimize camera poses and build the environmental map. Due to the semi-structured nature of the farms and fruit orchards, these conventional VSLAM methods often fail or perform poorly when being used in agricultural dataset. To effectively resolve the challenging semi-structured environment, it is important for robots to fully exploit objects and semantic information in their surrounding environment (Wang et al., 2020). Recent works in VSLAM show that adding object (Yang and Scherer, 2018) and semantic level information (Wen et al., 2021) to conventional visual feature points yields promising results. Among them, object SLAM is a typical application of semantic SLAM, which aims to estimate more robust and accurate camera poses by leveraging the semantic information of in-frame objects (Wu et al., 2020).
In this paper, Lettuce Farm SLAM Dataset (LFSD), a VSLAM dataset based on RGB and depth images captured by VegeBot (Hu et al., 2022a) in a lettuce farm, is presented. The dataset consists of RGB and depth images, IMU, and RTK-GPS sensor data. Detection and tracking of lettuce plants on images are annotated with the standard Multiple Object Tracking (MOT) format (Zhang et al., 2020). It aims to accelerate the development of algorithms for localization and mapping in the agricultural field, and crop detection and tracking. Our data and related supporting documents is publicly released at https://ieeedataport.org/documents/lfsd-dataset and https://github.com/wangshuo9707/LFSD-Dataset. Supplementary python scripts for converting raw data files (text and JPG image files) to ROS bag files for ROS1 and ROS2 systems, as well as converting MOT annotation files to target detection annotation files, are provided for the convenience of users.
The major contributions of the proposed dataset are summarized as follows:
-
Eight closed-loop sequences recorded in a lettuce farm by the VegeBot robot are provided, as shown in Figure 1A. The dataset is approximately 67 G, including RGB images, depth images and IMU information recorded by the Intel RealSense D435i sensor installed in front of the robot slightly facing downward. The MOT (Zhang et al., 2020) format is used to annotate part of the RGB and depth images, which is used to carry out research on detection and tracking of lettuce plants. RTK-GPS data is presented for performance evaluation of VSLAM algorithms. We tested three open source VSLAM algorithms with the proposed dataset, and report benchmark results for comparison purpose.
-
Compared to existing datasets for robotic localization and mapping in agricultural field, the proposed dataset provides plant detection and tracking annotation, which makes it possible for object level VSLAM. In addition, recording of closed-loop data in different growth stages of lettuces from the same area is helpful for designing a spatio-temporal model of a dynamic scene. Specifically, the dataset provided by Pire et al. (2018) does not contain any plant detection information. Though the dataset provided by Chebrolu et al. (2017) provided semantic labels for RGB-NIR image pairs, there is no straightforward object labels for each individual plants and correlations between plants in consecutive images. Therefore, it can not be directly used for object level VSLAM. Even if the RGB-NIR data can be post-processed to extract all objects and their correspondences for object level VSLAM, the resulting localization lacks scale information since the RGB-NIR camera is essentially a single pinhole camera. In comparison, our method directly provides plant detection and tracking information for RGB and depth image pairs, which is suitable to evaluate object level VSLAM without lack of scale information.
2 Materials and methods
2.1 Data acquisition
The dataset was collected in the spring of 2022 and 2023, respectively, at a lettuce farm in Tongzhou district, Beijing, China. The lettuce is planted in a ridge transplanting mode, and two rows are planted on each ridge. The distance between rows and plants is about 35cm. At the time of data collection, the lettuce was in the rosette stage, and there is no obvious overlap between plants. The VegeBot robot used to collect data is developed by China Agricultural University. It is powered by 8 servo motors for four-wheel independent drive and steering, so that it can drive in various farms with great flexibility as shown in Figure 1A. The VegeBot is equipped with a RTK-GPS sensor for GNSS-based global positioning and a forward-tilted Intel RealSense D435i depth camera with an IMU sensor. In order to ensure the recording quality of the dataset, the robot is remotely controlled following the middle of the plant rows as much as possible with a speed of about 0.6m/s. When the robot is driving straight along the lettuce ridge, it adopts the front-wheel Ackerman steering method to ensure smooth progress. When turning at the end of the ridge, it adopts synchronous four-wheel steering to provide the smallest turning radius.
Figure 1

Details of data acquisition. (A) Robot and installed sensors. (B) Geological location of the farm and GPS trajectories of the eight sequences of the dataset. (C) Illustration of the coordinate frames. The a is base_link, the b is D435i_link, and the c is GPS_link. The x-axis is colored red, the y-axis is green, and the z-axis is blue.
The Intel RealSense D435i depth camera is approximately 1.1m high from the ground and tilted slightly downward with an angle of 40° between horizontal line. For Intel RealSense D435i camera, its RGB Field of View (FOV) is 69° ×42°, the maximum resolution is 1920×1080, and the frame rate is 30 Frames Per Second (FPS). The FOV of depth image can reach 87° ×58°, the maximum resolution is 1280×720, the maximum frame rate is 90 FPS, and the depth accuracy is< 2%. It provides a wide field of view in a global shutter mode, so it can cover a wider area and has high adaptability to low-light environments. An IMU is also available to measure acceleration and rotation rate with 6 Degree Of Freedom (DOF). During the data collection, it streams RGB images with a size of 1280×720, and aligned depth images at 10 FPS. It streams IMU information at 200 HZ. The RTK-GPS sensor based on GNSS global positioning receives the satellite signal and the differential signal of the base station, and performs RTK calculation internally. Finally, the longitude and latitude position information with centimeter-level precision and direction information are released at 1HZ. All sensor data is recorded by the on-board computer with Intel i5-9400 CPU, NVIDIA RTX1650 GPU, 8 GB DDR4 RAM, 1T hard disk, and operating system of Ubuntu 18.04. Sensor data is recorded with their Robot Operating System (ROS) drivers in terms of asynchronous ROS topics. Timestamp is recorded for each piece of information, which is used for synchronizing data from multiple sensors.
In total, the robot drives eight closed loop trajectories. With each trajectory, the robot starts from the first ridge, continuously drives through the lettuce field with multiple ridges, finally returns to the first ridge, and drives for a certain distance, as shown in Figure 1B. Sequences 1 to 4 are closed-loop recordings from four different areas recorded in 2022. Among them, Sequences 1 and 2 cover large area of the farm. Due to the regular weed removal in the field of sequence 1, the density of weed is low throughout the planting period. In comparison, in order to enhance the richness and complexity of the dataset, the areas where sequences 2, 3, and 4 are located have not been manually cleared of weeds, so the density of weed is relatively high. Sequences 5 to 8 are closed-loop recordings of the same area captured in 2023. In these four sequences, the weed density is comparatively low. The resolution of RGB and depth images recorded by the D435i sensor is 640×480. The tilt angle between the sensor and the horizontal line is set to 45 degree to obtain a wider field of view.
2.2 Dataset
2.2.1 Extrinsics between different coordinates
To facilitate the data fusion of different sensors, we provide the 3D coordinate transformations between the base_link of the robot and all other sensors. Among them, the RTK-GPS has two satellite signal receiving antennas, which run in master slave mode. The master antenna on the left side serves as the base point of positioning, which is denoted as GPS_link. The slave antenna on the right side assists the master antenna in positioning by providing the orientation of yaw and pitch angles. The RTK-GPS sensor does not provide the roll angle. The robot base_link is located in the middle of two GPS antennas over its Y axis direction, as shown in Figure 1C. The coordinate transformations of other sensors relative to the base_link are shown in Table 1, where the translation is given by x, y and z, and the rotation is given by the quaternion.
Table 1
| Frame | x(m) | y(m) | z(m) | qx | qy | qz | qw |
|---|---|---|---|---|---|---|---|
| base_link | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
| GPS_link | 0 | -0.491 | 0 | 0 | 0 | -0.707 | 0.707 |
| D435i_link1 | -0.383 | 0 | -0.034 | -0.242 | -0.242 | -0.665 | 0.665 |
| D435i_link2 | -0.383 | 0 | -0.034 | -0.271 | -0.271 | -0.653 | 0.653 |
Rigid transformation from different sensors to the robot base_link.
1Extrinsic transformation of D435i sensor relative to base_link in sequences 1, 2, 3, and 4.
2Extrinsic transformation of D435i sensor relative to base_link in sequences 5, 6, 7, and 8.
2.2.2 Dataset structure and image annotation
There are eight sequences in the dataset, corresponding to the eight trajectories in Figure 1B. In order to prevent data loss during recording, it is saved every 5 to 8 minutes, so each sequence is split into multiple files in chronological order. For the convenience of users who are not familiar with ROS, the dataset originally recorded with ROS drivers is converted into image and text data files. Each sequence is subdivided into data folders for two sensors, GPS and D435i, as shown in Figure 2A.
Figure 2
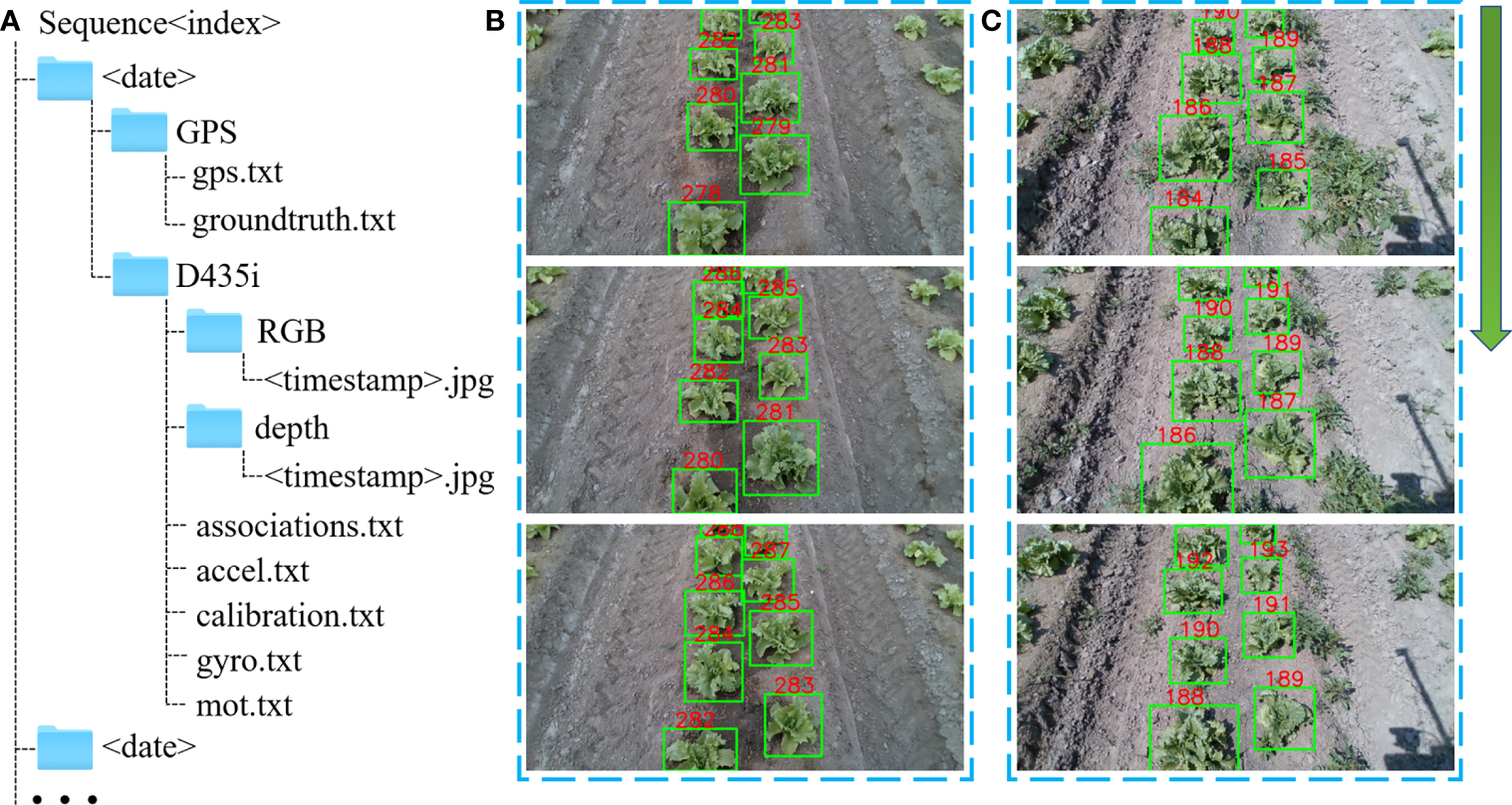
Dataset format and image annotation. (A) File structure for dataset. The the term<index> identifies each piece of data, the term<date> refers to the day of the data acquisition, and the term<timestamp>is the timestamp recorded by ROS. (B) Example of annotated plants in the low weed density scene of sequence 1. (C) Example of annotated plants in the high weed density scene of sequence 2.
2.2.2.1 RTK-GPS
The gps.txt file in the GPS folder contains original GPS data, including longitude, latitude and altitude positional information as well as three-axis attitude angle information, with its format detailed as follows,
where GPS< timestamp > is the ROS timestamp. To estimate the accuracy of the visual odometry and VSLAM algorithms, The latitude and longitude coordinates (lat, lon, altitude) are converted into Cartesian coordinates (x, y, z). In the converted Cartesian coordinates, the robot initial position is
set to be the origin of the coordinate system. The orientation of the robot is expressed in quaternion. Using the extrinsic transformation between base_link and the GPS_link, the ground truth base_link trajectories are also provided. It is saved in the groundtruth.txt file, with its format detailed as follows,
where x, y, z are used to indicate the position of the robot, and qx, qy, qz, qw are quaternions used to indicate the rotation of the robot.
2.2.2.2 D435i
The D435i folder contains both RGB and depth images, and uses ROS timestamps as names of the images. As there is a short interval between the timestamp published by the two topics, it is necessary to associate and synchronize the RGB and depth images. It is provided in the associations.txt file, whose format is as follows,
where RGB< timestamp > and depth< timestamp > are the corresponding image names in the
RGB folder and the depth folder, respectively. calibration.txt contains the camera intrinsic parameters, which are obtained based on the calibration method of Zhang (1999). This file consists of the camera’s intrinsic parameters fx, fy, cx, cy, the radial distortion coefficients k1, k2, k3, and the tangential distortion coefficients p1, p2. accel.txt and gyro.txt are accelerometer and gyroscope data, respectively. mot.txt contains annotated lettuce detection and tracking information expressed in the popular MOT format. In addition to detection, tracking of lettuce plants offers correlation between object detection results between consecutive images, as shown in Figures 2B, C, which helps to identify the same landmarks for object level SLAM methods. This is especially convenient for researchers to design object level SLAM algorithms using lettuce plants as landmarks.
The DarkLabel tool is used to label images, and the label format is:
where RGB< timestamp > is the name of the RGB image, id is the ID number of individual lettuce. x and y are the coordinates of the upper left corner of the label box, and w and h are the width and height of the label box. The last three the numbers 1,0,1 are not used in this dataset. All images of sequence 3 are annotated, while images of only one ridge of sequences 1, 2, and 4 are annotated. The detailed information is summarized in Table 2.
Table 2
| Sequence | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| Sensors | D435i GPS | |||||||
| Resolution | 1280×720 | 640×480 | ||||||
| Number of images (Frame) | 44018 | 28134 | 7120 | 7498 | 9555 | 9709 | 9247 | 10275 |
| Number of labeled images | 2437 | 2084 | 7120 | 1768 | / | / | / | / |
| Tracks (Track) | 889 | 538 | 2468 | 511 | / | / | / | / |
| Boxes (Box) | 19846 | 13585 | 51166 | 11138 | / | / | / | / |
| Ridges/Labeled ridges | 16/1 | 14/1 | 4/4 | 4/1 | 4/0 | 4/0 | 4/0 | 4/0 |
| Weed density | Less | Normal | Many | Many | Less | Less | Normal | Normal |
| Loop closure | Strict | Strict | Strict | Strict | Strict | Strict | Strict | Strict |
| The weather | Cloudy | Sunny | Sunny | Sunny | Cloudy | Cloudy | Sunny | Sunny |
| Light intensity | Weak | Strong | Strong | Normal | Weak | Normal | Normal | Strong |
| Dynamic environment | No | No | No | No | No | No | No | No |
| Occlusion condition | No | No | No | No | No | No | No | No |
| Acquisition time | 2022.4.26 P.M | 2022.5.2 P.M | 2022.5.2 P.M | 2022.5.5 P.M | 2023.4.17 P.M | 2023.4.22 A.M | 2023.4.26 A.M | 2023.5.3 A.M |
Summary of the eight sequences of the proposed dataset.
The details of data from each sensor are summarized as follows.
2.3 Evaluation of MOT and VSLAM algorithms with the proposed dataset
Extensive evaluation of popular VSLAM algorithms, as well as MOT methods, are conducted with the proposed dataset. All methods run on a computer with I9 10850K CPU, NVIDIA RTX 3070 GPU, 32G DDR4 RAM, and the operating system of Ubuntu 18.04.
Firstly, three popular MOT algorithms, which are namely FairMOT (Zhang et al., 2020), ByteTrack+NSA kalman filter (Du et al., 2021) and YOLOV5+SORT (Bewley et al., 2016), are tested with 1-4 sequences of the dataset. The results are shown in Table 3, and the ByteTrack+NSA kalman filter performs the best among all. The provided benchmark results are helpful to researchers in developing new MOT methods, and comparing their performance with existing methods based on the proposed dataset.
Table 3
| Sequence | Method | HOTA(%)↑ | DetA(%)↑ | AssA(%)↑ | DetRe(%)↑ | DetPr(%)↑ | AssRe(%)↑ | AssPr(%)↑ |
|---|---|---|---|---|---|---|---|---|
| 1 | FairMOT | 39.17 | 56.11 | 28.09 | 60.28 | 79.43 | 31.21 | 47.68 |
| ByteTrack+NSA kalman filter | 76.74 | 75.79 | 77.69 | 76.20 | 99.16 | 77.96 | 99.40 | |
| YOLOV5+SORT | 65.79 | 63.86 | 69.66 | 67.18 | 81.98 | 73.49 | 87.86 | |
| 2 | FairMOT | 50.03 | 54.08 | 51.06 | 58.58 | 74.97 | 54.51 | 77.05 |
| ByteTrack+NSA kalman filter | 78.87 | 77.64 | 80.15 | 78.84 | 97.67 | 80.75 | 98.71 | |
| YOLOV5+SORT | 67.54 | 65.89 | 70.31 | 70.23 | 81.51 | 74.46 | 86.59 | |
| 3 | FairMOT | 51.85 | 54.19 | 51.39 | 57.79 | 74.82 | 54.24 | 79.19 |
| ByteTrack+NSA kalman filter | 74.92 | 73.56 | 76.39 | 74.93 | 96.59 | 76.99 | 98.23 | |
| YOLOV5+SORT | 64.34 | 62.96 | 67.04 | 66.87 | 79.82 | 71.04 | 84.64 | |
| 4 | FairMOT | 44.95 | 52.15 | 39.79 | 55.97 | 75.82 | 42.18 | 65.53 |
| ByteTrack+NSA kalman filter | 75.35 | 73.77 | 77.03 | 74.86 | 97.31 | 77.62 | 98.33 | |
| YOLOV5+SORT | 65.49 | 63.34 | 70.35 | 66.73 | 81.28 | 74.16 | 88.38 |
Performance of three MOT methods with the proposed Dataset.
a Symbols ↑ after the evaluation metrics indicate the value of it is the higher the better.
HOTA, DetA, AssA, DetRe, DetPr, AssRe and AssPr are comprehensive evaluation indicators for the MOT method, and their detailed explanations can be found in (Bewley et al., 2016; Zhang et al., 2020; Du et al., 2021; Hu et al., 2022a).The bold values show the best performing method.
In order to show the characteristics of the challenging semi-structured environment of the lettuce farm, we run three popular open source VSLAM algorithms, i.e. ORB-SLAM3 (Campos et al., 2020), DSO (Matsuki et al., 2018), and OA-SLAM (Zins et al., 2022), with the proposed dataset. Among them, OA-SLAM is an object level VSLAM. It uses the YOLOv5 deep neural net to detect objects, and uses the Hungarian algorithm to find the optimal data association (Zins et al., 2022). The performance of VSLAM algorithms is reflected by their accuracy, robustness, computational efficiency, scalability, map quality, and real-time performance. The Absolute Trajectory Error (ATE) (Sturm et al., 2012) is used to evaluate the accuracy of the VSLAM algorithms. The mean execution time to process one image is used to evaluate real-time performance of different methods. The results are shown in Tables 4 and 5. Among the three methods, only the ORB-SLAM3 and OA-SLAM result in complete tracking and positioning on sequence 3 and 7. All methods fail with the other six sequences, so they are only tested on the single ridge of each sequence.
Table 4
| Sequence | Overall length /m | Test length /m | ORB-SLAM3 | OA-SLAM | DSO | |
|---|---|---|---|---|---|---|
| RGBD↓b | Monocularc↓ | Monocular ↓ | Monocular↓ | |||
| 1 | 2565.28 | 154.38 | 6.05(3.91%)d | 14.07(9.11%) | 5.46(3.53%) | 7.01(4.54%) |
| 2 | 1637.35 | 112.80 | 2.56(2.27%) | 27.49(24.37%) | 7.22(6.40%) | 6.79(6.02%) |
| 3 | 455.37 | 455.37 | 39.99(8.78%) | /e | 19.22(4.22%) | / |
| 4 | 481.66 | 108.20 | 2.18(2.01%) | 38.03(35.15%) | 6.12 (5.65%) | 8.31(7.68%) |
| 5 | 478.22 | 79.31 | 1.88(2.37%) | 8.17(10.30%) | 3.43(4.32%) | 3.22 (4.06%) |
| 6 | 481.28 | 97.85 | 4.13(4.22%) | 9.49(9.70%) | 0.84(0.80%) | 6.17(6.30%) |
| 7 | 477.13 | 477.13 | 11.18(2.34%) | / | 16.10(3.37%) | / |
| 8 | 493.01 | 112.47 | 4.54(4.03%) | 11.78(10.47%) | 1.31(1.16%) | 10.67(9.48%) |
Performance of VSLAM algorithms with the proposed dataset in terms ATE.
bSymbols ↓ after the evaluation metrics indicate the value of it is the lower the better.
cOnly RGB images are used for monocular VSLAM. In this case, the optimum scale information is used during evaluation.
dThe numbers in brackets represent the ratio of ATE over trajectory length (%).
eFailure of the method.The bold values show the best performing method.
Table 5
| Sequence | Resolution | ORB-SLAM3 | OA-SLAM | DSO | |
|---|---|---|---|---|---|
| RGBD↓ | Monocular↓ | Monocular↓ | Monocular↓ | ||
| 1 | 1280×720 | 26.25 | 26.15 | 49.56 | 72.25 |
| 2 | 1280×720 | 33.53 | 33.64 | 64.51 | 73.16 |
| 3 | 1280×720 | 36.62 | / | 69.72 | / |
| 4 | 1280×720 | 36.03 | 35.91 | 70.22 | 77.28 |
| 5 | 640×480 | 29.81 | 32.92 | 35.21 | 37.52 |
| 6 | 640×480 | 32.21 | 25.71 | 38.52 | 41.22 |
| 7 | 640×480 | 22.53 | / | 44.54 | / |
| 8 | 640×480 | 34.15 | 34.25 | 49.6 | 43.51 |
Mean execution times (ms) of VSLAM algorithms with the proposed dataset.
The bold values show the best performing method.
The Symbols ↓ after the evaluation metrics indicate the value of it is the lower the better.
The results in Table 4 show that in semi-structured lettuce field with repeated texture, both the ORBSLAM3 method relying on ORB features and the DSO method based on the sparse direct method are prone to failure. When the scene is large, as the driving distance increases, the visual odometry drifts quickly, and the ATE grows accordingly, which eventually leads to fail. Based on the results of ORB-SLAM3, it can be seen that using RGB and depth images yields more accurate results than relying on RGB images alone, and it is less likely to result in failure. Failure of ORB-SLAM3 happens mostly when the camera moves quickly when turning, causing blurry images, or when the soil texture is similar at headland. The DSO algorithm requires photometric calibration, and it fails where strong illumination change happens. Compared to these two methods relying on low-dimensional features, the OA-SLAM algorithm tracks lettuce plants, and exploits high level semantic information. In the monocular mode, it yields better localization accuracy than the other two algorithms. The performance of OA-SLAM degrades in scenes with high weed density,e.g., sequences 4 and 7.
Therefore, it is critical to design a robust MOT method based object level VSLAM to effectively resolve the challenging situation of semi-structured environment of agricultural farms. Combined with feature points such as low-dimensional ORB features, the accuracy of camera pose estimation can be greatly improved. On the other hand, in repeated texture scenes, the success rate of loop closure detection based on lettuce plant detection can be increased compared to the conventional methods based on e.g. binary bag of words (Wang and Zell, 2018; Wang et al., 2020). The main goal of the proposed dataset is exactly to validate object level VSLAM based on plant detection and tracking.
The mean execution times of three VSLAM methods to process one image are summarized in Table 5, which are provided by their open source codes when running in offline mode. It can be seen that ORBSLAM3 yields the best real-time performance in both monocular and RGBD mode. OA-SLAM is based on ORB-SLAM2 method (Zins et al., 2022), and requires to carry out additional object detection and tracking step, which adds additional time consumption. Interestingly, DSO is reported to be generally faster than ORB-SLAM3, which disagrees with the test results of the proposed dataset. It is likely to be caused by the fact that, due to the complex texture of the soil in the challenging agricultural field, there are many pixels with significant brightness gradient change, which increases the run time for the semi-dense mapping.
Statements
Data availability statement
The datasets presented in this study can be found in online repositories. The names of the repository/repositories and accession number(s) can be found below: https://ieee-dataport.org/documents/lfsd-datasethttps://github.com/wangshuo9707/LFSD-Dataset.
Author contributions
SW, DS, and LZ contributed to the design of the data acquisition. SW, ML, and HY collected the experimental data. SW, and YJ organized and labelled the data. SW and DS wrote the first draft of the manuscript. NH and YT wrote sections of the manuscript. All authors contributed to manuscript revision, read, and approved the submitted version.
Funding
This research was financially supported by the National Key Research and Development Program of China (No. 2016YFD0700302).
Acknowledgments
We would like to thank the editor and reviewers for their valuable input, time, and suggestions to improve the quality of the manuscript.
Conflict of interest
ML was employed by the company Beijing Zhong Nong LV Tong Agriculture Development LTD.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
1
Bewley A. Ge Z. Ott L. Ramos F. T. Upcroft B. (2016). “Simple online and realtime tracking,” in 2016 IEEE International Conference on Image Processing (ICIP). 3464–3468.
2
Bonny T. Kashkash M. (2022). Highly optimized q-learning-based bees approach for mobile robot path planning in static and dynamic environments. J. Field Robot.39, 317–334. doi: 10.1002/rob.22052
3
Cadena C. Carlone L. Carrillo H. Latif Y. Scaramuzza D. Neira J. et al . (2016). Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age. IEEE Trans. Robot.32, 1309–1332. doi: 10.1109/TRO.2016.2624754
4
Campos C. Elvira R. Rodr’iguez J. J. G. Montiel J. M. M. Tardós J. D. (2020). Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam. IEEE Trans. Robot.37, 1874–1890. doi: 10.1109/TRO.2021.3075644
5
Chebrolu N. Lottes P. Schaefer A. Winterhalter W. Burgard W. Stachniss C. (2017). Agricultural robot dataset for plant classification, localization and mapping on sugar beet fields. Int. J. Robot. Res.36, 1045–1052. doi: 10.1177/0278364917720510
6
Dong J. Burnham J. G. Boots B. Rains G. C. Dellaert F. (2016). “4d crop monitoring: Spatio-temporal reconstruction for agriculture,” in 2017 IEEE International Conference on Robotics and Automation (ICRA). 3878–3885.
7
Dos A. Ferreira S. Freitas D. M. Silva G. G. D. Pistori H. Folhes M. T. (2017). Weed detection in soybean crops using convnets. Comput. Electron. Agric.143, 314–324. doi: 10.1016/j.compag.2017.10.027
8
Du Y. Wan J.-J. Zhao Y. Zhang B. Tong Z. Dong J. (2021). “Giaotracker: A comprehensive framework for mcmot with global information and optimizing strategies in visdrone 2021,” in 2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW). 2809–2819.
9
Engel J. Schöps T. Cremers D. (2014). “Lsd-slam: Large-scale direct monocular slam,” in Computer Vision–ECCV 2014: 13th European Conference, Zurich, Switzerland, September 6-12, 2014. 834–849, Proceedings, Part II 13.
10
Geiger A. Lenz P. Stiller C. Urtasun R. (2013). Vision meets robotics: The kitti dataset. Int. J. Robot. Res.32, 1231–1237. doi: 10.1177/0278364913491297
11
Gené-Mola J. Vilaplana V. Polo J. R. R. Morros J. R. Ruiz-Hidalgo J. Gregorio-Lopez E. (2019). Multi-modal deep learning for fuji apple detection using rgb-d cameras and their radiometric capabilities. Comput. Electron. Agric.162, 689–698. doi: 10.1016/j.compag.2019.05.016
12
Gupta A. Fernando X. (2022). Simultaneous localization and mapping (slam) and data fusion in unmanned aerial vehicles: Recent advances and challenges. Drones6, 85. doi: 10.3390/drones6040085
13
Hansen M. K. Christiansen P. H. Laursen M. S. Larsen M. Steen K. A. Green O. et al . (2017). Fieldsafe: Dataset for obstacle detection in agriculture. Sensors17, 2579. doi: 10.3390/s17112579
14
Hu N. Su D. Wang S. Nyamsuren P. Qiao Y. Jiang Y. et al . (2022a). Lettucetrack: Detection and tracking of lettuce for robotic precision spray in agriculture. Front. Plant Sci.13, 1003243. doi: 10.3389/fpls.2022.1003243
15
Hu N. Wang S. Wang X. Cai Y. Su D. Nyamsuren P. et al . (2022b). Lettucemot: A dataset of lettuce detection and tracking with re-identification of re-occurred plants for agricultural robots. Front. Plant Sci.13, 1047356. doi: 10.3389/fpls.2022.1047356
16
Klein G. Murray D. (2007). “Parallel tracking and mapping for small ar workspaces,” in 2007 6th IEEE and ACM International Symposium on Mixed and Augmented Reality. 225–234.
17
Lu Y. Young S. (2020). A survey of public datasets for computer vision tasks in precision agriculture. Comput. Electron. Agric.178, 105760. doi: 10.1016/j.compag.2020.105760
18
Matsuki H. von Stumberg L. Usenko V. C. Stückler J. Cremers D. (2018). Omnidirectional dso: Direct sparse odometry with fisheye cameras. IEEE Robot. Autom. Lett.3, 3693–3700. doi: 10.1109/LRA.2018.2855443
19
Olsen A. Konovalov D. A. Philippa B. W. Ridd P. V. Wood J. C. Johns J. et al . (2018). Deepweeds: A multiclass weed species image dataset for deep learning. Sci. Rep.9, 2058. doi: 10.1038/s41598-018-38343-3
20
Pezzementi Z. A. Tabor T. Hu P. Chang J. K. Ramanan D. Wellington C. K. et al . (2018). Comparing apples and oranges: Off-road pedestrian detection on the national robotics engineering center agricultural person-detection dataset. J. Field Robot.35, 545–563. doi: 10.1002/rob.21760
21
Pire T. Mujica M. Civera J. Kofman E. (2018). The rosario dataset: Multisensor data for localization and mapping in agricultural environments. Int. J. Robot. Res.38, 633–641. doi: 10.1177/0278364919841437
22
Ponnambalam V. R. Bakken M. Moore R. J. D. Gjevestad J. G. O. From P. J. (2020). Autonomous crop row guidance using adaptive multi-roi in strawberry fields. Sensors20, 5249. doi: 10.3390/s20185249
23
Schubert D. Goll T. Demmel N. Usenko V. C. Stückler J. Cremers D. (2018). “The tum vi benchmark for evaluating visual-inertial odometry,” in 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 1680–1687.
24
Sturm J. Engelhard N. Endres F. Burgard W. Cremers D. (2012). “A benchmark for the evaluation of rgb-d slam systems,” in 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. 573–580.
25
Su D. Qiao Y. Kong H. Sukkarieh S. (2021). Real time detection of inter-row ryegrass in wheat farms using deep learning. Biosyst. Eng.204 (12), 198–211. doi: 10.1016/j.biosystemseng.2021.01.019
26
Tourani A. Bavle H. Sanchez-Lopez J. L. Voos H. (2022). Visual slam: What are the current trends and what to expect? Sensors22, 9297. doi: 10.3390/s22239297
27
Wang T. Chen B. Zhang Z. Li H. Zhang M. (2022). Applications of machine vision in agricultural robot navigation: A review. Comput. Electron. Agric.198, 107085. doi: 10.1016/j.compag.2022.107085
28
Wang Y. Qiu Y. Cheng P. Duan X. (2020). Robust loop closure detection integrating visual–spatial– semantic information via topological graphs and cnn features. Remote Sens.12, 3890. doi: 10.3390/rs12233890
29
Wang Y. Zell A. (2018). “Improving feature-based visual slam by semantics,” in 2018 IEEE International Conference on Image Processing, Applications and Systems (IPAS). 7–12.
30
Wen S. Li P. Zhao Y. Zhang H. Sun F. Wang Z. (2021). Semantic visual slam in dynamic environment. Auton. Robot.45, 493–504. doi: 10.1007/s10514-021-09979-4
31
Wu Y. Zhang Y. Zhu D. Feng Y. Coleman S. Kerr D. (2020). “Eao-slam: Monocular semi-dense object slam based on ensemble data association,” in 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 4966–4973.
32
Yang S. Scherer S. A. (2018). Cubeslam: Monocular 3-d object slam. IEEE Trans. Robot.35, 925–938. doi: 10.1109/TRO.2019.2909168
33
Zhang Z. (1999). “Flexible camera calibration by viewing a plane from unknown orientations,” in Proceedings of the Seventh IEEE International Conference on Computer Vision, Vol. 1. 666–673.
34
Zhang Y. Wang C. Wang X. Zeng W. Liu W. (2020). Fairmot: On the fairness of detection and re-identification in multiple object tracking. Int. J. Comput. Vision129, 3069–3087. doi: 10.1007/s11263-021-01513-4
35
Zins M. Simon G. Berger M.-O. (2022). “Oa-slam: Leveraging objects for camera relocalization in visual slam,” in 2022 IEEE International Symposium on Mixed and Augmented Reality (ISMAR). 720–728.
36
Zujevs A. Pudzs M. Osadcuks V. Ardavs A. Galauskis M. Grundspen K. et al . (2021). “An eventbased vision dataset for visual navigation tasks in agricultural environments,” in 2021 IEEE International Conference on Robotics and Automation (ICRA). 13769–13775.
Summary
Keywords
dataset, agriculture, robotics, SLAM, MOT, lettuce, detection
Citation
Wang S, Su D, Li M, Jiang Y, Zhang L, Yan H, Hu N and Tan Y (2023) LFSD: a VSLAM dataset with plant detection and tracking in lettuce farm. Front. Plant Sci. 14:1175743. doi: 10.3389/fpls.2023.1175743
Received
28 February 2023
Accepted
01 August 2023
Published
29 August 2023
Volume
14 - 2023
Edited by
Lei Shu, Nanjing Agricultural University, China
Reviewed by
Ronnie Concepcion II, De La Salle University, Philippines; Matteo Frosi, Polytechnic University of Milan, Italy
Updates
Copyright
© 2023 Wang, Su, Li, Jiang, Zhang, Yan, Hu and Tan.
This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Yu Tan, tanyu@cau.edu.cn
Disclaimer
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.